The Lateral No-slip feature applies heading correction when the land vehicle is not
slipping. When the vehicle is slipping the lateral acceleration is usually large enough that
the normal heading corrections provide excellent results. When combined with a wheel
speed input the drift of the RT when GNSS is not available is drastically reduced.
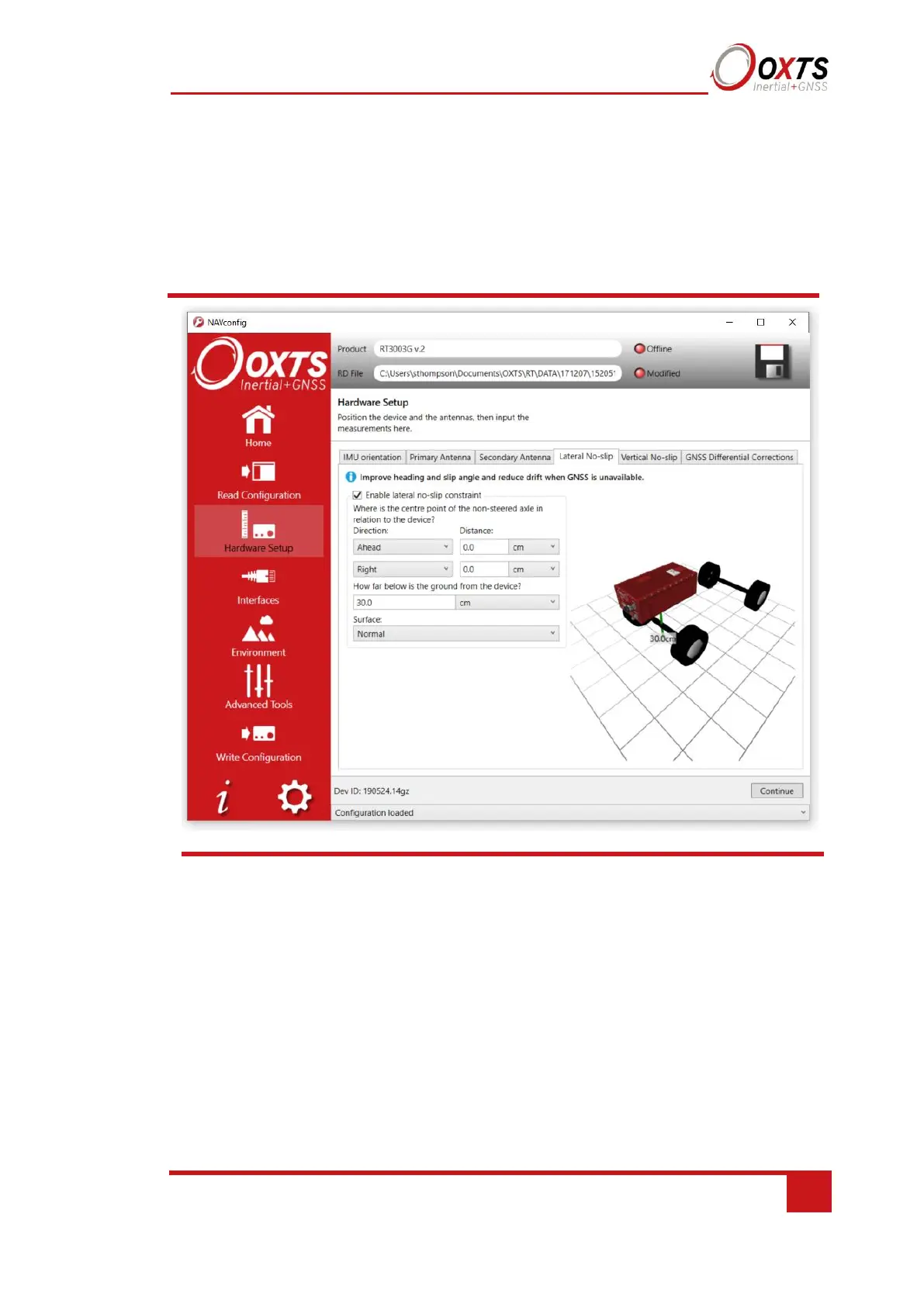
Figure 22 shows the Lateral No-Slip tab.
Figure 22. NAVconfig Lateral No-slip tab in the Hardware setup section
For the Lateral settings, the system needs to know the position of the non-steered axle
(rear wheels on a front-wheel steering vehicle and vice versa). A position at road
height, mid-way between the rear wheels should be used as shown in Figure 22.
Vehicles with all wheels steering cannot use this feature reliably, although minor
steering of the rear wheels does not significantly affect the results.