CAN Output tab
RT systems can be configured to send and receive data via a CAN bus. This allows RT
data to be sent to external logging devices, and signals from a test vehicle’s CAN bus to
be logged alongside navigation data inside an RT.
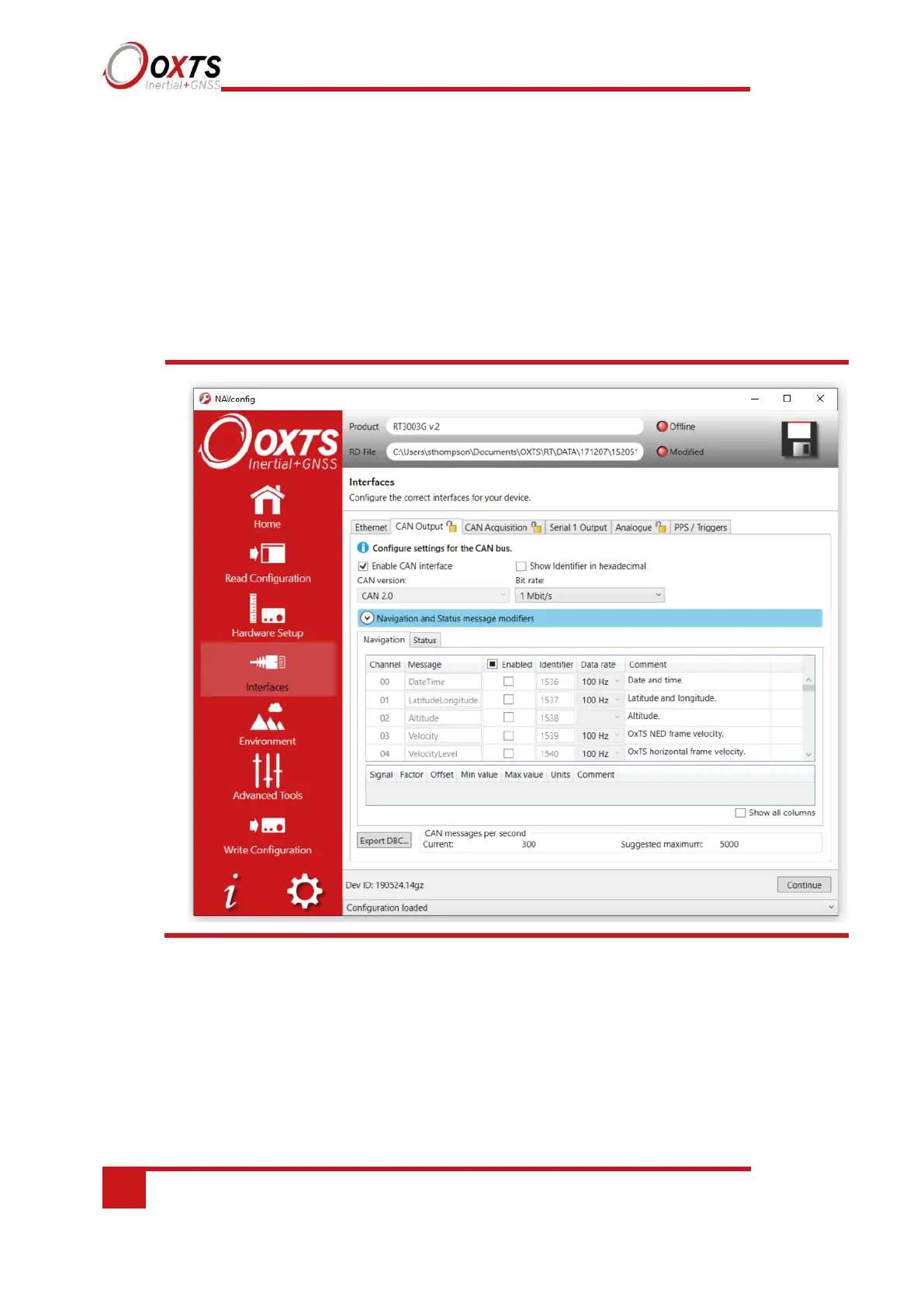
By default, CAN communication is disabled. It is enabled by selecting the Enable CAN
interface checkbox (see Figure 28). The default version is CAN 2.0. CAN-FD is also
available.
Figure 27. NAVconfig CAN output configuration tab
You can select individual messages or enable all messages by choosing them from the table
displayed.
Depending on the baud rate selected, the suggested maximum CAN messages per second will
change. A warning message will appear if the combined rate of all current navigation and status
messages will overload the CAN bus at the selected baud rate.