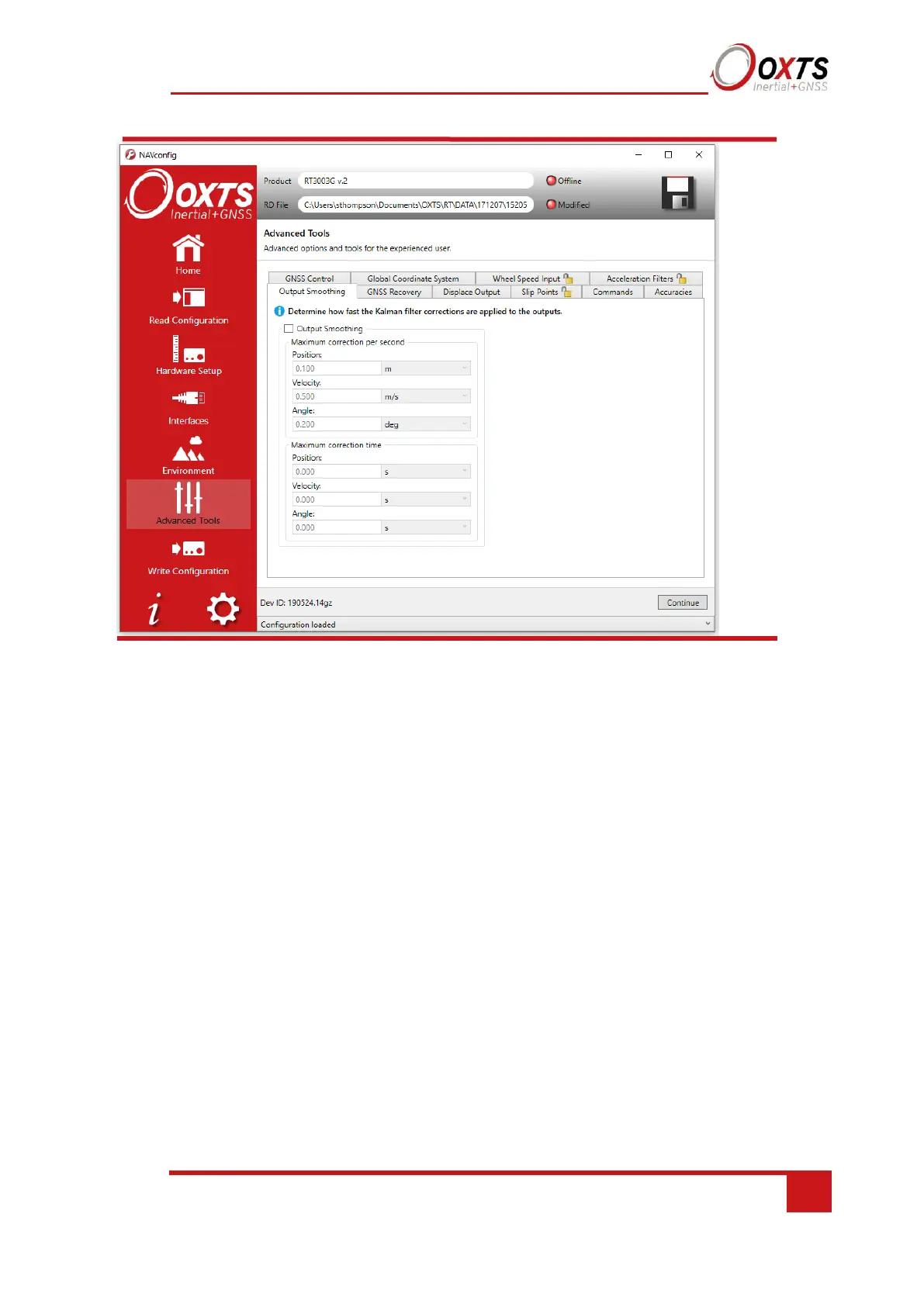
Figure 35. NAVconfig output smoothing properties window
The smoothing of the position, velocity and orientation corrections can be controlled
independently. Enter the maximum correction that can be applied every second. For
example, if 0.1 m is entered for the position smoothing then the RT will only correct a
position error by a maximum rate of 0.1 m/s.
If a large error is accumulated (for example, if GNSS is not available for a long period of
time) then it may take a very long time to apply the correction. Under these circumstances
it may be preferable to “jump” the measurement to the correct value quickly. By specifying
a time in the Time limit section for the correction, the RT will jump the measurement if it
will take too long to correct.
Care should be taken not to make the smoothing too small. If these parameters are
inappropriate, then the RT will not be able to make suitable corrections to the outputs and
it will not work correctly.
Note: this function is designed to improve the data in real time. When post-processing the
data using the forwards-backwards combined option, output smoothing should not be used
as it may give unexpected results.
Slip Points tab
The RT can output the slip angle measurements at additional points (maximum of eight
points) on the CAN bus; see Table 38 for the CAN message ID of the slip points. Figure
37 shows the tab for slip point configuration in the Advanced Tools section within
NAVconfig.