Parker Hannifin
Troubleshooting 157
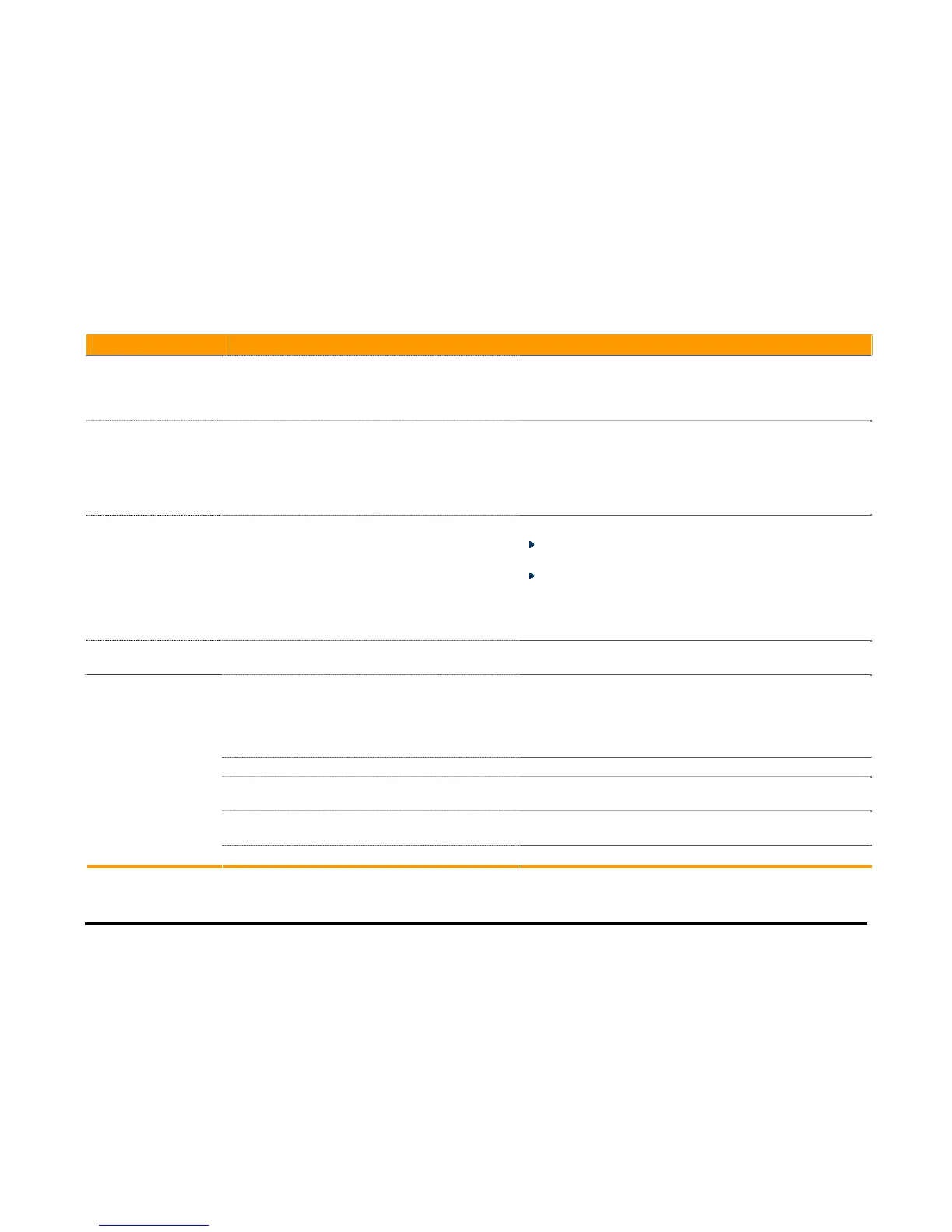
PROBLEM CAUSE / VERIFICATION SOLUTION
Motion stops
unexpectedly
Axis has encountered soft limits.
Verify: Status Panels Æ Bit Status Æ Axis Flags Æ
Quinary Axis Flags. (Each axis is indicated by Bit
“Positive/Negative Soft Limit Encountered.”)
Jog off the limit. Clear the appropriate Positive/Negative Soft
Limit Encountered Bit. Clear the associated Master Kill All
Moves Request Bits.
Axis has encountered Positive/Negative End-of-
Travel (EOT) Limits.
Check if EOT limits have been encountered: Status
Panels Æ Bit Status Æ Axis Flags Æ Quinary Axis
Flags. (Each axis is indicated by Bit
“Positive/Negative EOT Limit Encountered.”
Clear the appropriate Positive/Negative End-of-Travel Limit
Encountered Bit. Clear any Master Kill All Motion Request Bit,
and any Axis Kill All Motion Request Bits.
I/Os not working Positive/Negative End-of-Travel (EOT) Limits not
working.
Check the wiring of the limits, referring to their
respective hardware installation guides.
Check if the Positive/Negative EOT Limits are
enabled: Status Panels Æ Bit Status Æ Axis Flags Æ
Quinary Axis Flags. (Each axis is indicated by Bit
“Positive/Negative EOT Limit Enable.”)
Check that the associated inputs toggled:
If using onboard I/O: Status Panels Æ Bit Status Æ
Onboard I/O and User Flags (0-3).
If using Expansion I/O: Status Panels Æ Bit Status Æ
CANopen Flags (ACR9000).
NOTE: A triggered output will create a contact closure, not a
voltage source.
I/O not working
properly
Incorrect I/Os wiring. Check wiring and external circuitry. Refer to ACR9000
Hardware Installation Guide.
Analog output / encoder multiplier mismatch.
Verify analog output by Status Panels Æ Numeric
Status Æ Object Parameters Æ DAC Parameters.
Verify encoder input by Status PanelsÆ Numeric
Status Æ Object Parameters Æ Encoder Parameters.
If encoder feedback is correct for appropriate direction, change
“DAC GAIN” to the opposite value.
If encoder feedback is not correct for appropriate direction,
change “ENC MULT” to the opposite value.
Amplifier has an analog input offset. Correct the analog offset in the amplifier.
Electrical noise. Reduce electrical noise or move the product away from the
noise source.
Improper shielding. Use shielded, twisted pair wiring for encoder inputs,
DAC/stepper outputs, and ADC inputs.
Servo motor runs
away;
Improper wiring. Check wiring for shorts, opens, and mis-wired connections.
Table 1 Common Problems and Their Solutions

 Loading...
Loading...









