Parker Hannifin
REN Details
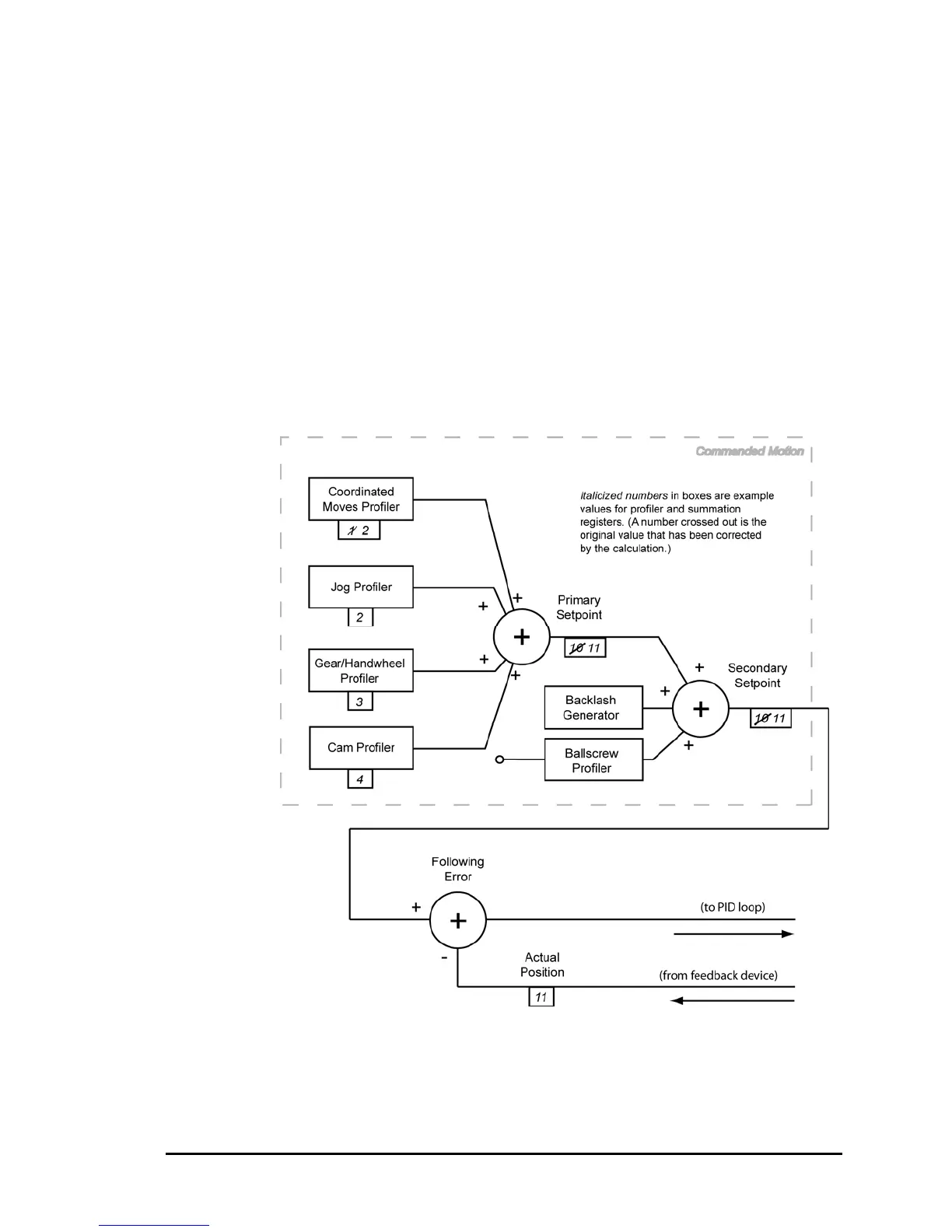
The REN command copies the actual position from the encoder into
the Secondary Setpoint of the servo loop. The values for the Primary
Setpoint register and for the Coordinated Moves Profiler’s offset are
then calculated backwards from the Secondary Setpoint. This action
removes the following error.
In the example in Figure 2, the actual position is 11. That number is
copied into the register for the Secondary Setpoint, and the Primary
Setpoint is then calculated (11).
The Jog, Gear, and Cam profilers’ offsets do not change. The values
in their registers are subtracted from the Primary Setpoint to get the
offset for the Coordinated Moves Profiler:
11–[2+3+4]=2
Figure 2 Calculations for REN Command
Making Motion 61

 Loading...
Loading...









