User Manual
E712T0010, valid for E-712.N1, E-712.1AM, E-712.1AN, .2AN, .3AN
CMo, BRo, 10/31/2024
Physik Instrumente (PI) SE & Co. KG, Auf der Römerstraße 1, 76228 Karlsruhe, Germany page 10 / 40
Phone +49 721 4846-0, fax +49 721 4846-1019, e-mail info@pi.ws, www.pi.ws
Fig. 6 shows the signals during one step cycle in full-step mode. Assuming that the displacement during one
shearing phase is about 2 µm (value can differ depending on the PiezoWalk
®
drive type), the step size for one
complete cycle is 4 µm. Decreasing the amplitude of the shearing voltages will decrease the step size. Motion is
not uniform but interrupted during the clamping phases.
Full-step mode is selected if the PiezoWalk Driving Mode parameter is set to 0.
Full-step mode motion can be commanded as follows, depending on the current servo mode (open-loop or
closed-loop operation selected with SVO command):
Open-loop operation: Motion is commanded with OSM. OSM only accepts integer values for the number
of steps to be performed. Motion starts and ends in the “relaxed state”: with the first step cycle, all piezo
voltage signals start from 0 V, and at the end of the last step cycle all piezo voltage signals are set back to
0 V again by the simple relax procedure.
Closed-loop operation: Motion is commanded with MOV or MVR. If the target position is almost reached,
the driving mode is automatically switched to analog mode (after a simple relax procedure).
Irrespective of the current servo mode, all piezo actuators of the piezo drive modules are in contact with the
runner at the end of motion.
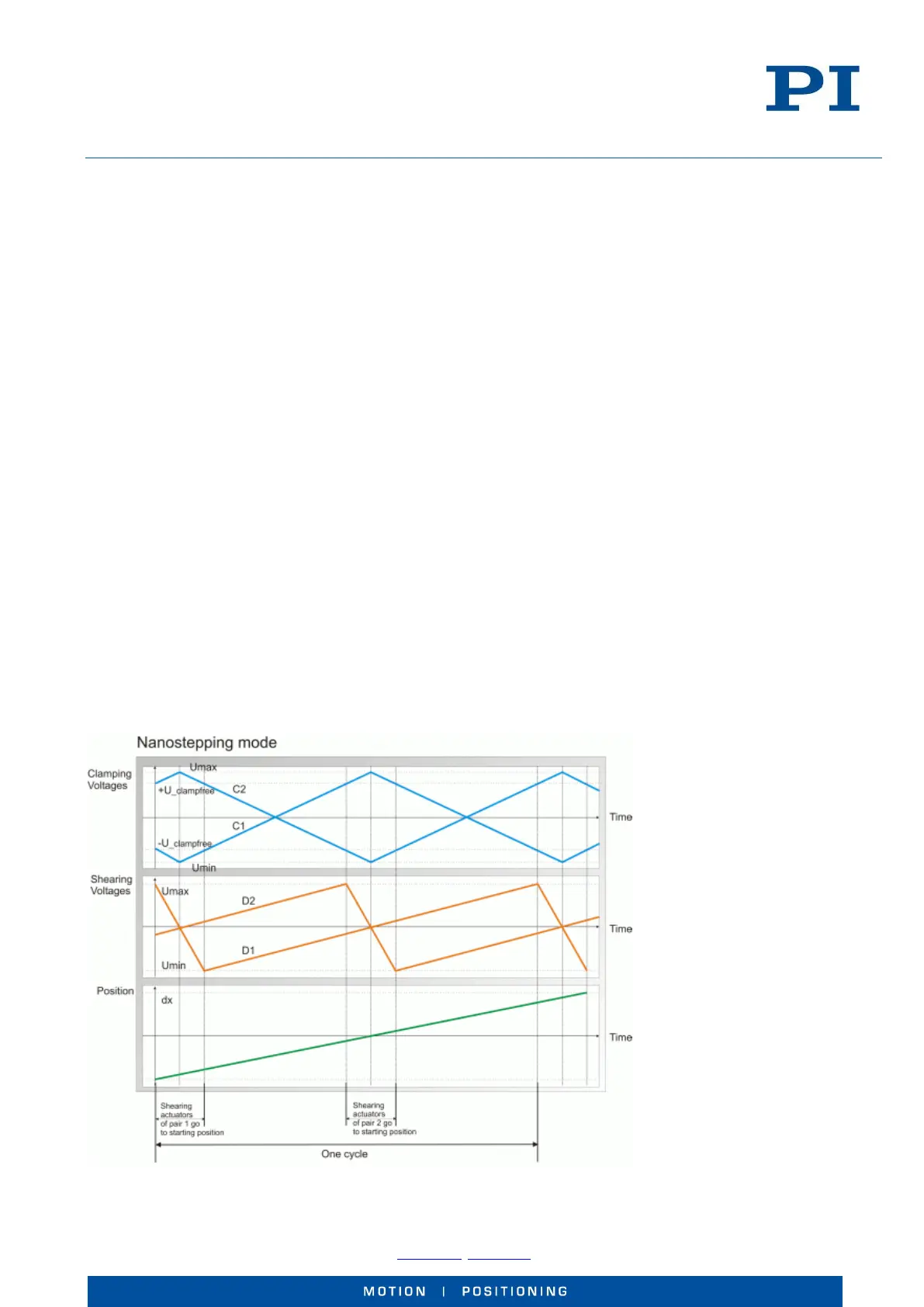
3.6 Nanostepping Mode
With this kind of stepping motion, the piezo voltages for the shearing and clamping components change
simultaneously. During certain phases of the step cycle, both piezo actuator pairs are in contact with the runner,
and all shearing components then move in the same direction. This behavior is called „overlapping“ and results in
steady motion of the runner.
Fig. 7: One step cycle in nanostepping mode; shearing and clamping voltages and motion over time