34
5. Back in office, convert log file to RINEX format, and upload to online PPP service to obtain
accurate position coordinate P
1
of the mobile RTK base.
6. The offset delta between approximate base position P
0
and PPP-derived accurate position P
1
is
delta = P
0
– P
1
7. Subsequently correct all rover surveyed points by – delta, i.e. P’
M
= P
M
– delta
a b
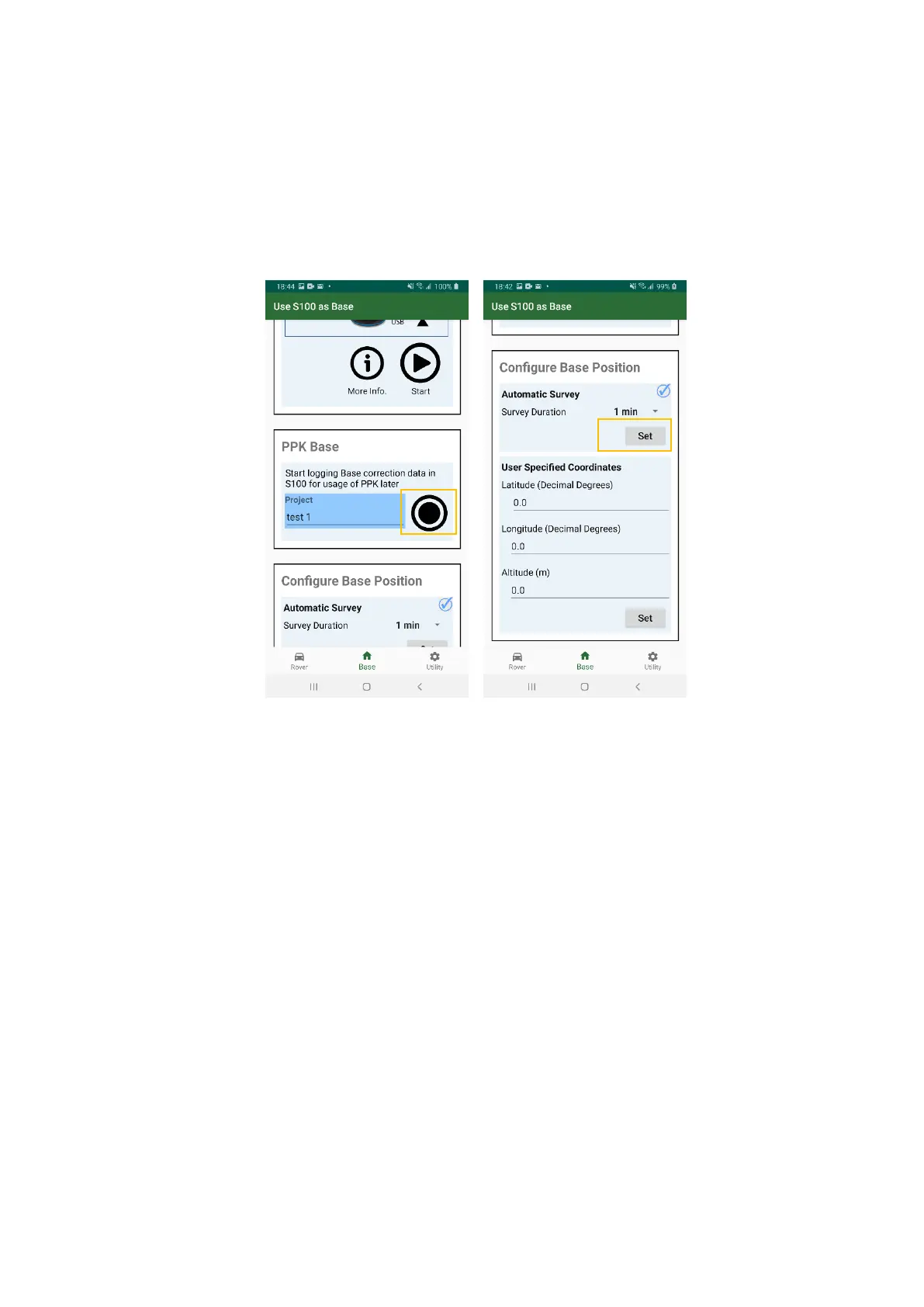
Figure A-2

 Loading...
Loading...