364 Rockwell Automation Publication 2080-UM002N-EN-E - November 2022
Appendix H User-defined Function Block Motion Instructions
The raC_Opr_K5100_MSF instruction deactivates the motor. This instruction must be used
when there are no active faults on the drive and the drive is in the Ready state. The resulting
state of the drive is reflected when Ref_Ctrl_Sts_In.Active is zero.
Error Codes:
• 100 - Kinetix 5100 drive is not ready
• 101 - Kinetix 5100 drive is faulted
• 104 - Another raC_Opr_K5100_MSF message is executing
• 129 - Motor not connected
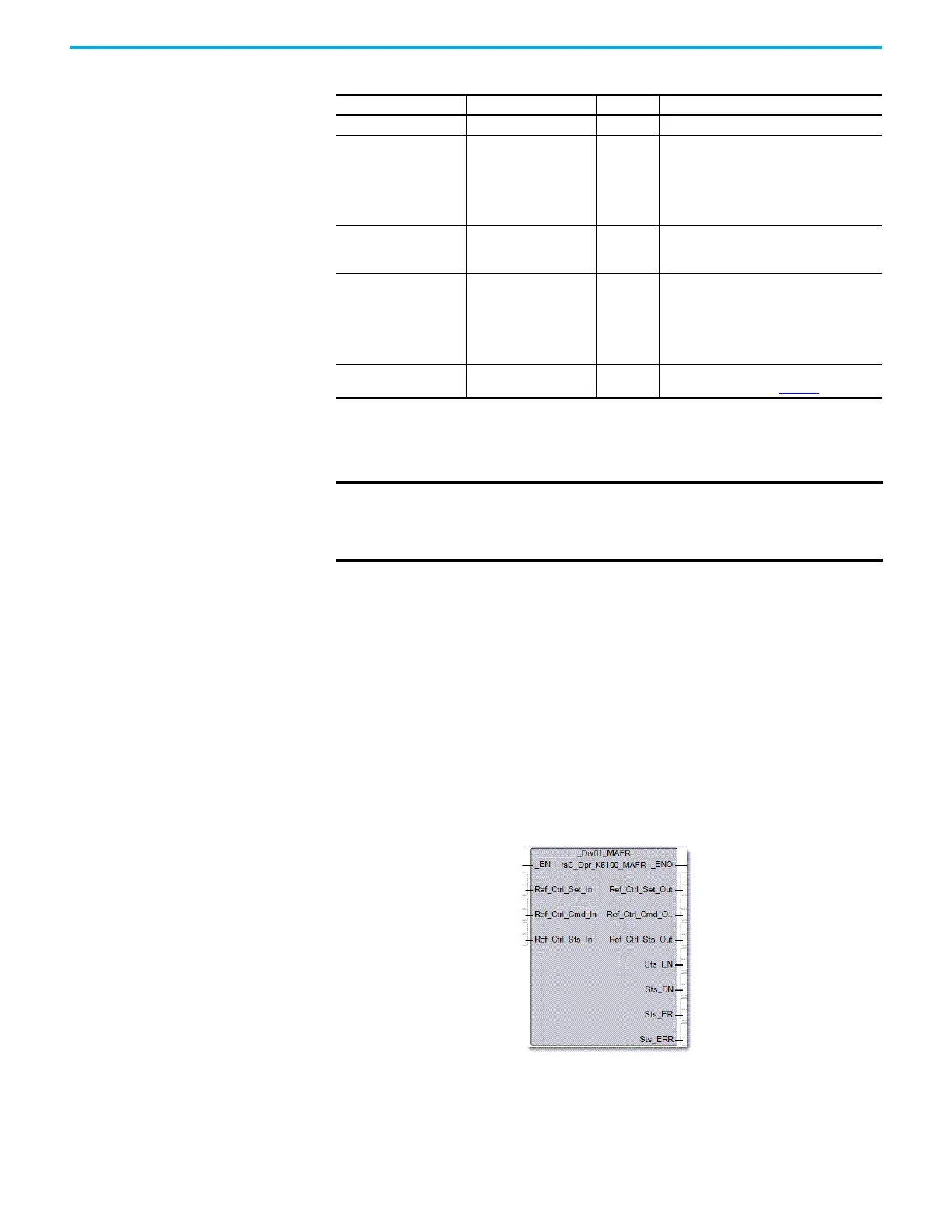
raC_Opr_K5100_MAFR
Use the Motion Axis Fault Reset (raC_Opr_K5100_MAFR) instruction to clear some drive faults.
When the fault is no longer active in the drive, this instruction clears the fault. This instruction
does not clear any faults that are still active in the drive.
Figure 42 - MAFR Diagram
Ref_Ctrl_Sts_Out raC_UDT_Itf_K5100_Sts Tag Interface to device object.
Sts_EN (Enable) BOOL Tag
This bit is set when the rung makes a false-
to-true transition and remains set as the
message transaction to activate the drive is
initiated and in process. It remains set while
the rung-in condition is true and no faults are
active.
Sts_DN (Done) BOOL Tag
This bit is set when the rung makes a false-
to-true transition and the cmd to activate the
drive has been acknowledged.
Sts_ER (Error) BOOL Tag
This bit is set when the rung makes a false-
to-true transition and there is an error that
has occurred with the instruction. (This
instruction error can be a result of a fault on
the drive itself). See Sts_ERR for details on
the cause of the error.
Sts_ERR DINT Tag
Instruction error codes. See Kinetix 5100
Drive UDFB Error Codes (Table 119
) for details.
IMPORTANT The instruction execution can take multiple scans to execute because it
requires multiple RPI updates to complete the request. The Done
(Sts_DN) bit is not set immediately, but only after the request is
completed.
Table 108 - MSF Operands (Continued)
Operand Type Format Description
 Loading...
Loading...