80 Rockwell Automation Publication 750-RM100A-EN-P - August 2019
Chapter 9 Reference Motion Planners
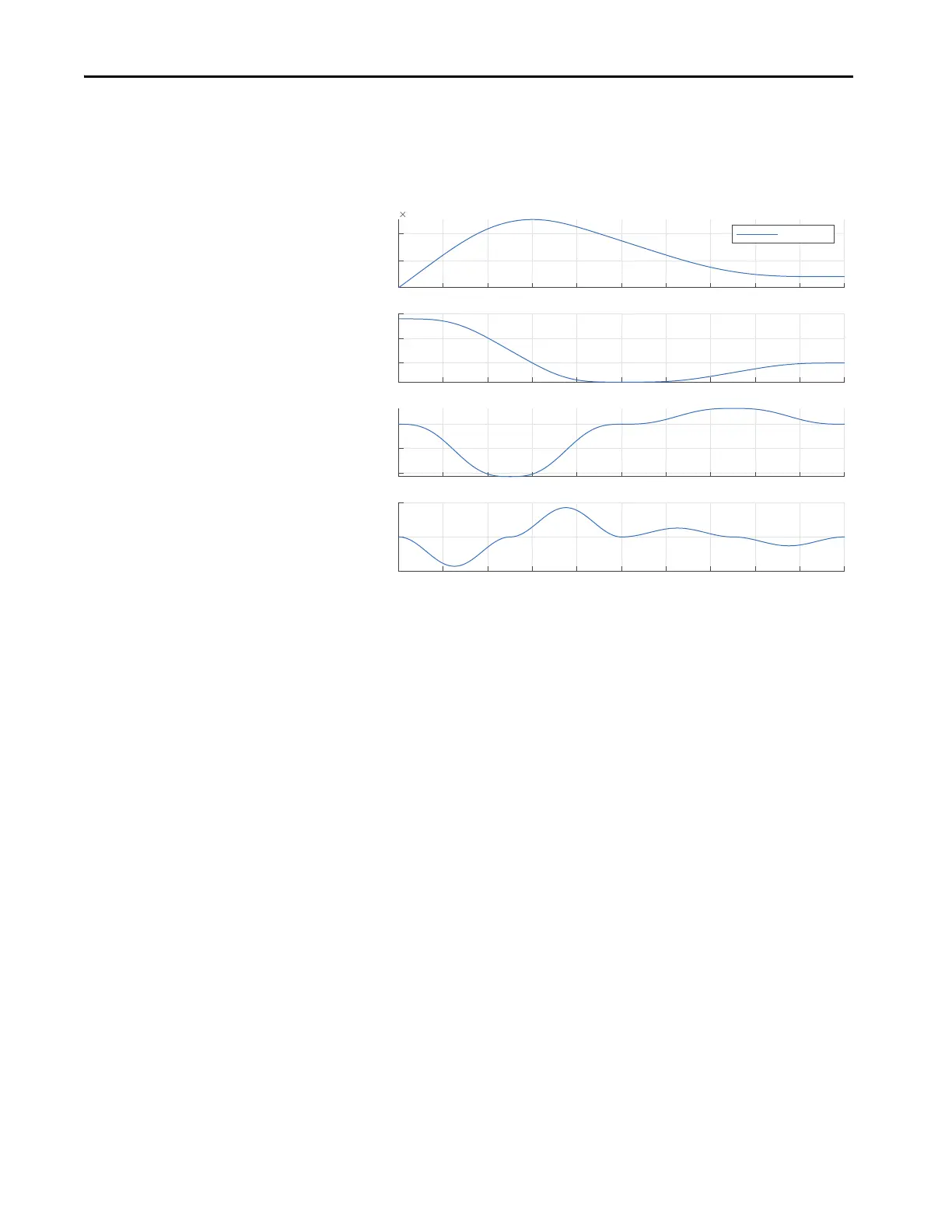
Initial velocities can increase so much with respect to the approaching target distance,
that there may only be time to decelerate past the new target, then reverse back to it.
When this occurs, parameter 10/11:1411 [PTP Move Seg] = ‘Reversing’.
Figure 27 - Index Move that Reverses
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
2
4
Compare Trajectories
Reversing
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
2
Vel
[RPM]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
2
-40
-20
0
Accel
[rev/sec
2
]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
2
Time [sec]
Jerk

 Loading...
Loading...











