Rockwell Automation Publication SYSLIB-RM044D-EN-P - February 2017 15
PowerFlex 753 Drive (P_PF753)
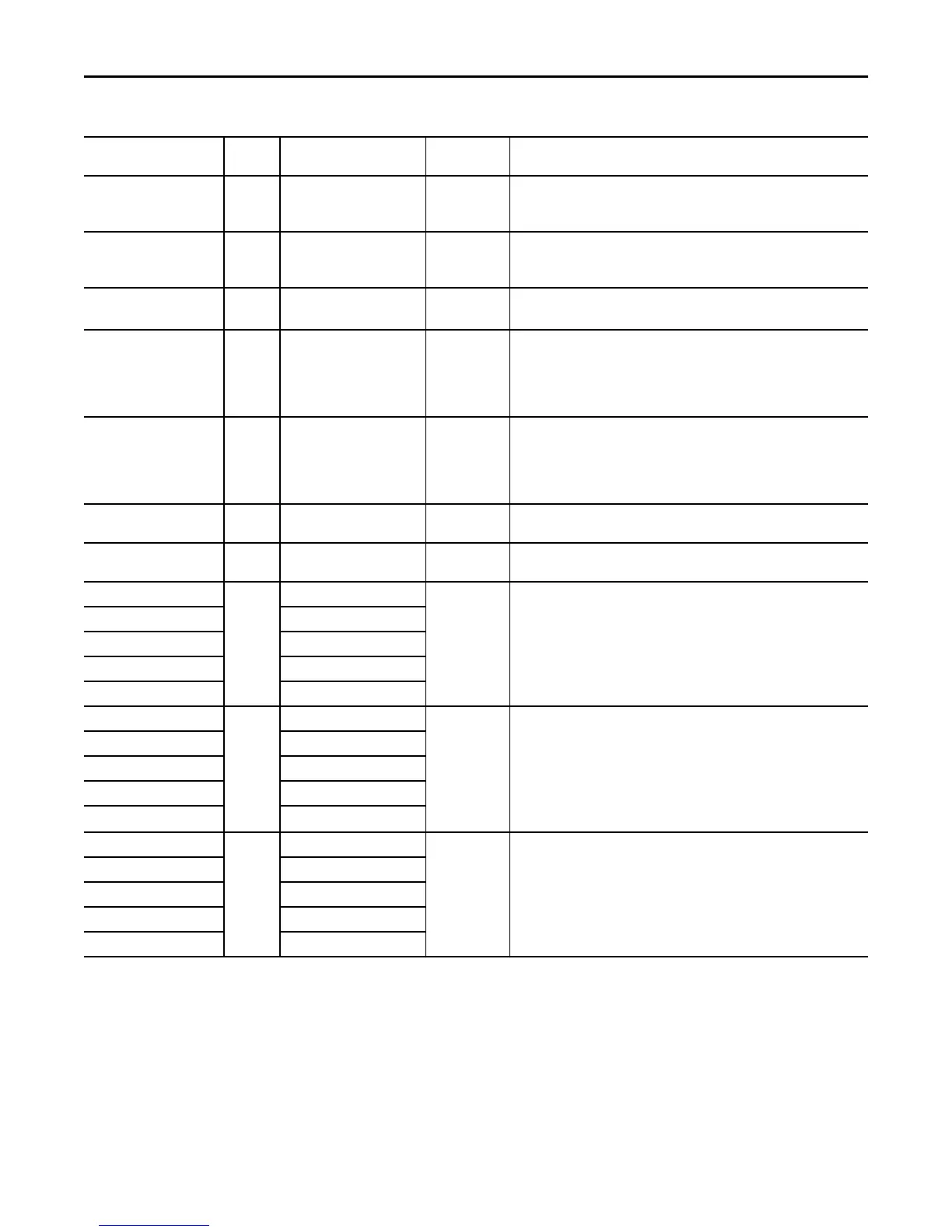
Cfg_OperStopPrio BOOL 0 1 = OCmd_Stop has priority, accepted any time. If OCmd_Stop stops the drive in
a mode other than Maintenance or Operator, a reset is required to start.
0 = OCmd_Stop only in Operator or Maintenance mode.
Cfg_OCmdResets BOOL 0 1 = New Operator drive command resets fault. If OCmd_Stop stops the drive in a
mode other than Maintenance or Operator, a reset is required to start.
0 = Reset required to clear fault.
Cfg_OvrdPermIntlk BOOL 0 1 = Override ignores Bypassable Permissive/ Interlock.
0 = Always use Permissive/ Interlock.
Cfg_ShedOnFailToStart BOOL 1 1 = Stop motor and alarm on Fail to Start.
0 = Alarm only on Fail to Start.
IMPORTANT: If a condition is configured to shed the device to the Stopped state
on a fault, a reset is required to clear the shed fault to command the drive to a
state other than Stopped.
Cfg_ShedOnIOFault BOOL 1 1 = Stop motor and alarm on I/O Fault.
0 = Alarm only on I/O Fault.
IMPORTANT: If a condition is configured to shed the device to the Stopped state
on a fault, a reset is required to clear the shed fault to command the drive to a
state other than Stopped.
Cfg_SimScaleEU BOOL 0 1 = In simulation, scale Speed Ref engineering units to Speed feedback
engineering units.
Cfg_SimScaleRaw BOOL 0 1 = In simulation, scale Speed Ref engineering units to raw, then raw to Speed
feedback engineering units.
Cfg_HasFailToStartAlm BOOL FailToStart.Cfg_Exists 0 These parameters determine whether the corresponding alarm exists and is
evaluated or if the alarm does not exist and is not used. When these parameters
are 1, the corresponding alarm exists.
Cfg_HasFailToStopAlm FailToStop.Cfg_Exists
Cfg_HasIntlkTripAlm IntlkTrip.Cfg_Exists
Cfg_HasDriveFaultAlm DriveFault.Cfg_Exists
Cfg_HasIOFaultAlm IOFault.Cfg_Exists
Cfg_FailToStartResetReqd BOOL FailToStart.Cfg_ResetReqd 0 These parameters determine whether a reset is required to clear the alarm status.
When these parameters are 1, the alarm is latched ON when the alarm occurs.
After the alarm condition returns to normal, a reset is required to clear the alarm
status (for example, OCmd_Reset, Inp_Reset, or Drivefault.OCmd_Reset are
required to clear Alm_DriveFault alarm after the alarm is set and the value
returns to normal). When these parameters are 0, no reset is required and the
alarm status is cleared when the alarm condition returns to normal.
IMPORTANT: If the reset clears the alarm, it also acknowledges the alarm.
Cfg_FailToStopResetReqd FailToStop.Cfg_ResetReqd
Cfg_IntlkTripResetReqd IntlkTrip.Cfg_ResetReqd
Cfg_DriveFaultResetReqd DriveFault.Cfg_ResetReqd
Cfg_IOFaultResetReqd IOFault.Cfg_ResetReqd
Cfg_FailToStartAckReqd BOOL FailToStart.Cfg_AckReqd 1 These parameters determine whether an acknowledgement is required for an
alarm. When these parameters are 1, the acknowledge (ack) bit is cleared when
the alarm occurs. An acknowledge command (for example, PCmd_FailAck or
Fail.OCmd_Ack) is required to acknowledge the alarm. When set to 0, the
Acknowledge bit is set when an alarm occurs indicating an acknowledged alarm
and no acknowledge command is required.
Cfg_FailToStopAckReqd FailToStop.Cfg_AckReqd
Cfg_IntlkTripAckReqd IntlkTrip.Cfg_AckReqd
Cfg_DriveFaultAckReqd DriveFault.Cfg_AckReqd
Cfg_IOFaultAckReqd IOFault.Cfg_AckReqd
Table 8 - P_PF753 Drive Input Parameters
Input Parameter Data
Type
Alias For Default Description

 Loading...
Loading...






