38| 8.0 LinLab - Motorized Device Configuration and Control
Software
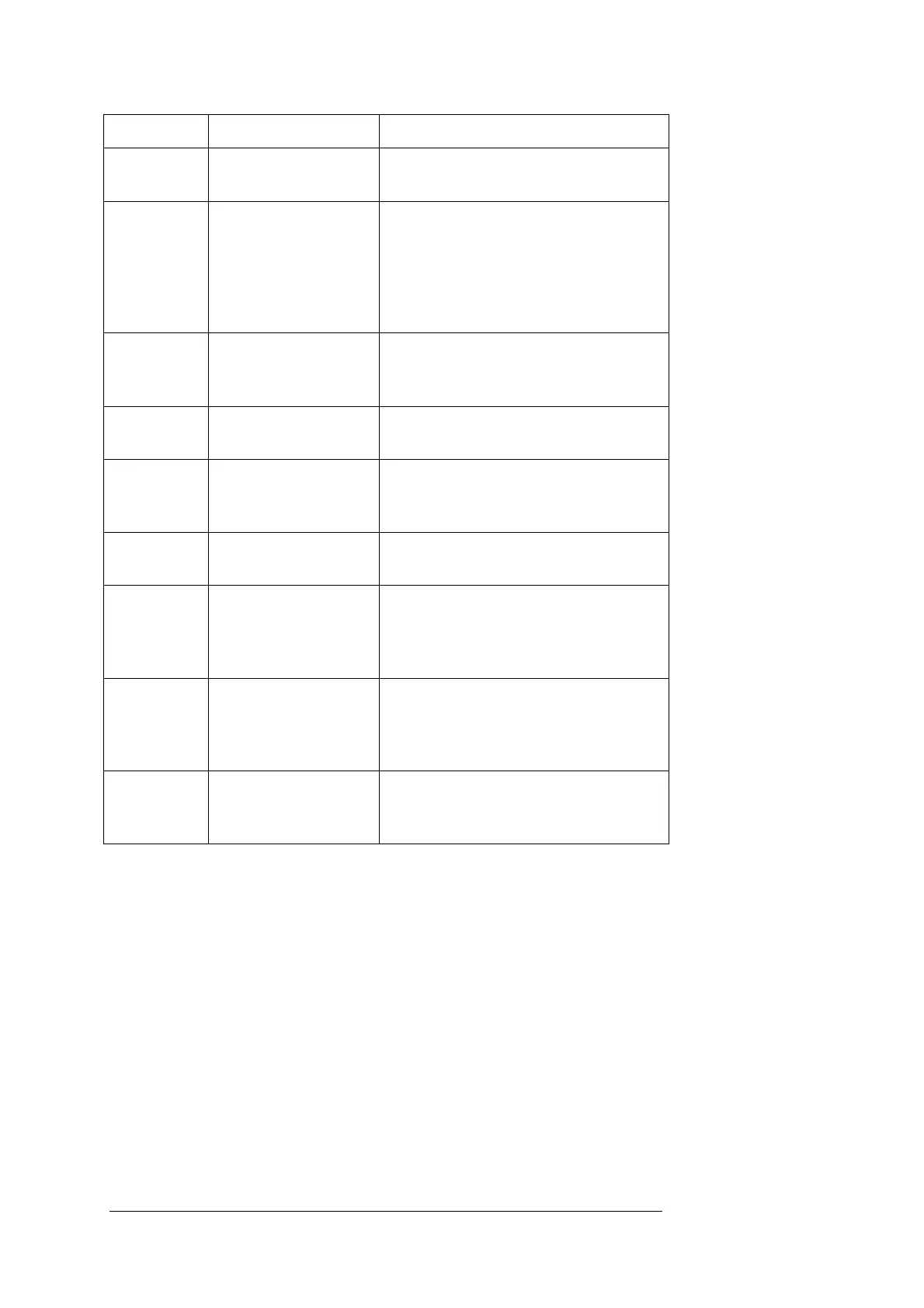
Command Title Description
REGOTO Re-map the GOTO
button
As RESAVE but for the go to
button.
IN Go to the home in
pos.
This command can only be used if
the last action was “OUT”, it will
move the axis to the position it was
before the “OUT” command was
issued less the was set by
“OFFSET”
OUT Move to Home Out This will move to the home out
position, which must have been set
by “SET”
OFFSET Set Home in offset This sets the home in Offset for use
by the “IN” command.
SET Set Home Out
position.
This sets the position the
manipulator will go to when “OUT”
is sent to the current position.
SETSTEP Set Step Size This sets the step which the Step
button will do after a home in.
JS Joystick speed This adjusts the speed the Rotary
Knob move the manipulator. If no
argument is sent the current setting
is returned.
ANGLE Approach Angle This sets the approach angle for the
manipulators x, and z-axis. The
approach is enabled after an angle
is sent.
APROACH Enable approach This enables or disables the
approach, an argument of 1
enables, while 0 disables.