AL S
08.95
AL S/1-7
Siemens AG 1997 All Rights reserved 6SN1197–0AA20
SIMODRIVE 611 (PJ)
Torque, which is generated at the maximum permissible current.
For high–dynamic (fast) operations and sequences, the following maxi-
mum accelerating torques are briefly available:
M
max
= 4 M
0
(100 K) for shaft heights 36, 48, 63 (non–ventilated)
M
max
= 4 M
0
(60 K) for shaft heights 71, 80, 100, 132 (non–ventilated)
M
max
= 2.5 M
0
(100 K) for shaft heights 71, 80, 100, 132 (force–venti-
lated)
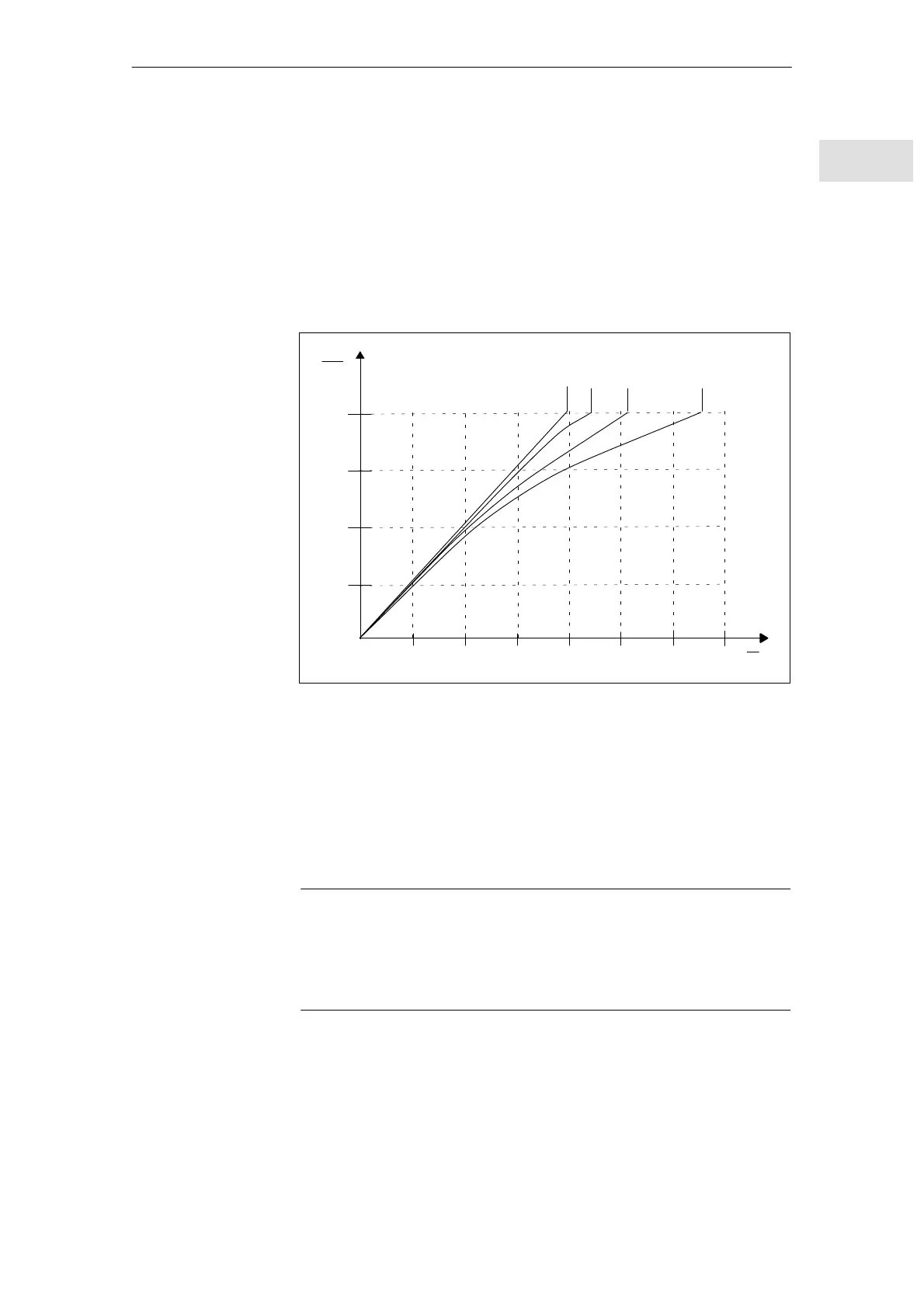
2
3
4
1
M
M
0
1
34 652
7
I
I
0
36
48
63
71
80
100
132
Shaft heights
Fig. 1-5 Torque–current characteristics for various shaft heights
The individual characteristics of the individual 1FT5/6 and 1FK6 motor series
are combined to form ”typical shaft height ranges”. The lefthand characteristic
can be considered as the “best case” and the righthand as “worst case”.
Quotient of the stall torque and stall current. k
T
= M
0
/I
0
. The constants are valid
to approx. 2 M
0
.
!
Important
The constants are not valid (motor losses!) when calculating the neces-
sary rated– and accelerating currents.
Further, the steady–state load and the friction torques must be included
in the calculation.
Value of the induced motor voltage at a speed of 1000 RPM. The phase–to–
phase motor terminal voltage is specified.
Maximum torque
M
max
Torque constant k
T
Voltage constant
k
E
General information on AC servomotors
1.1 Definitions