AL S
08.95
AL S/1-8
Siemens AG 1997 All Rights reserved 6SN1197–0AA20
SIMODRIVE 611 (PJ)
The resistance of a phase is specified at a room temperature of 20 °C. The
winding is in a star configuration.
The three–phase inductance L
D
= 1.5 < L
ph.
is specified
Quotient of the three–phase inductance and winding resistance. T
el
= L
D
/R
ph.
The mechanical time constant is obtained by the tangent along a theoretical
ramp–function starting at the origin.
1FT5: T
mech
= 2 < R
ph.
< J
mot
/k
T
2
[s]
1FT6/1FK6: T
mech
= 3 < R
ph.
< J
mot
/k
T
2
[s]
J
mot
= Moment of inertia of the servomotors [kgm
2
]
R
ph.
= Resistance of a stator winding phase [Ohm]
k
T
= Torque constant [Nm/A]
Defines the temperature increase of the motor housing when the motor load is
quickly increased (step increase) to the permissible S1 torque. After T
th
, the
motor has reached 63% of its final temperature.
Describes the power dissipation through the motor enclosure at the rated oper-
ating point.
R
a
opt
corresponds to the resistance, switched in series to the motor winding
externally for each phase, for armature short–circuit braking. If the resistor is 0,
the optimum braking is achieved without external resistors, i.e. a direct short–
circuit at the terminals.
M
b
opt
corresponds to the average optimum braking torque, which can be
achieved by modifying the resistance value.
(data going beyond this lie below the achievable measuring accuracy)
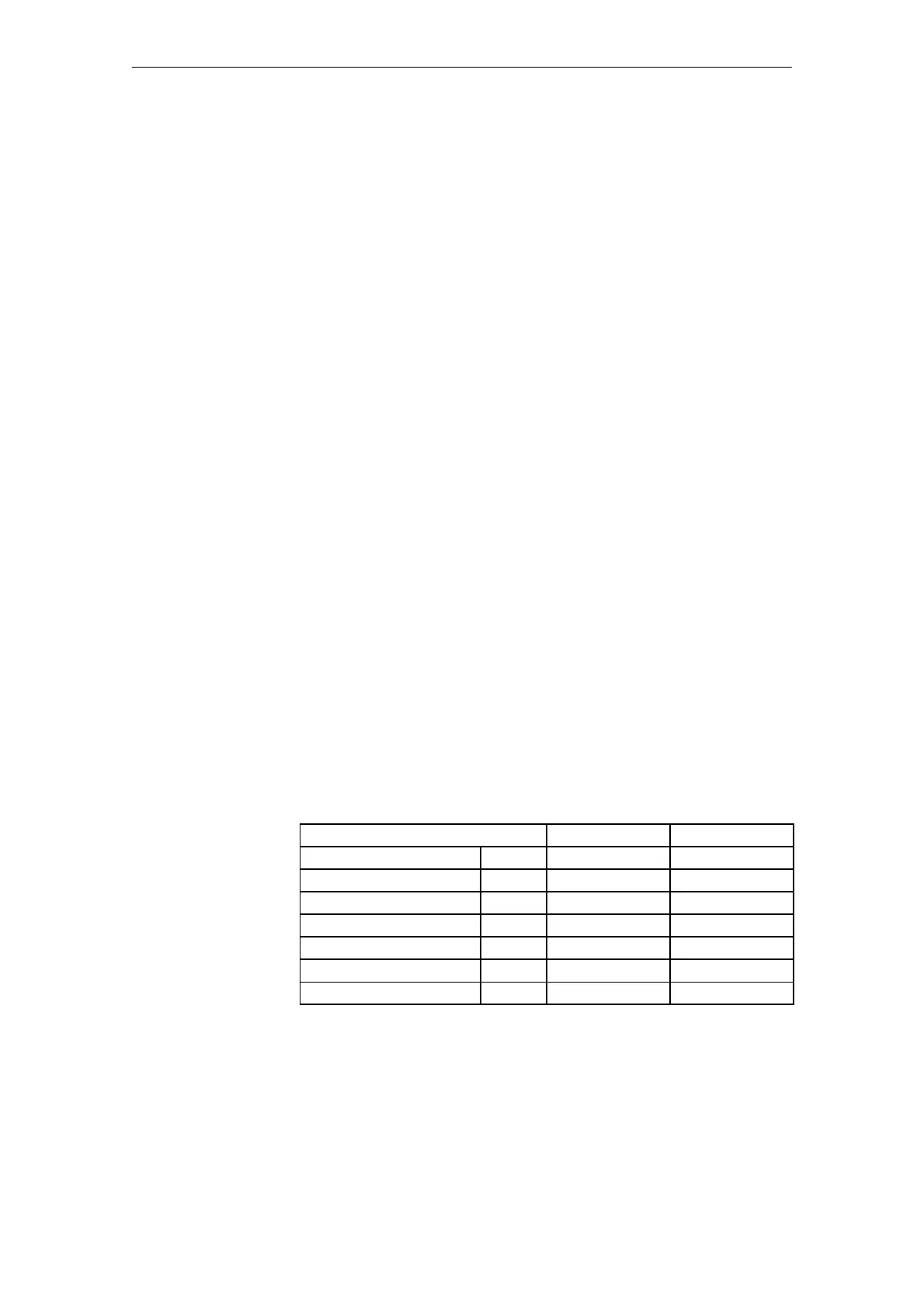
Table 1-2 Tolerance data of the motor list data
Motor list data
Typ. value Theoretical value
Stall current I
0
" 3 % " 7.5 %
Max. speed n
max
" 3 % " 7.5 %
Electrical time constant T
el
" 5 % " 10 %
Torque constant K
T
" 3 % " 7.5 %
Voltage constant K
E
" 3 % " 7.5 %
Winding resistance R " 5 % " 10 %
Moment of inertia J
Mot
" 2 % " 10 %
Core types are a subset of the complete motor spectrum. Core types have
shorter delivery times, and in some cases are available ex–stock. The option
versions are restricted. They have a different Order designation.
Winding
resistance R
ph.
Inductance L
D
Electrical time
constant T
el
Mechanical time
constant T
mech
Thermal time
constant T
th
Thermal
resistance R
th
Brake resistor R
a
opt
Braking torque
M
b
opt
Tolerance data
Core types
General information on AC servomotors
1.1 Definitions