Start-Up
4-38
SINUMERIK 802S base line
Start-Up
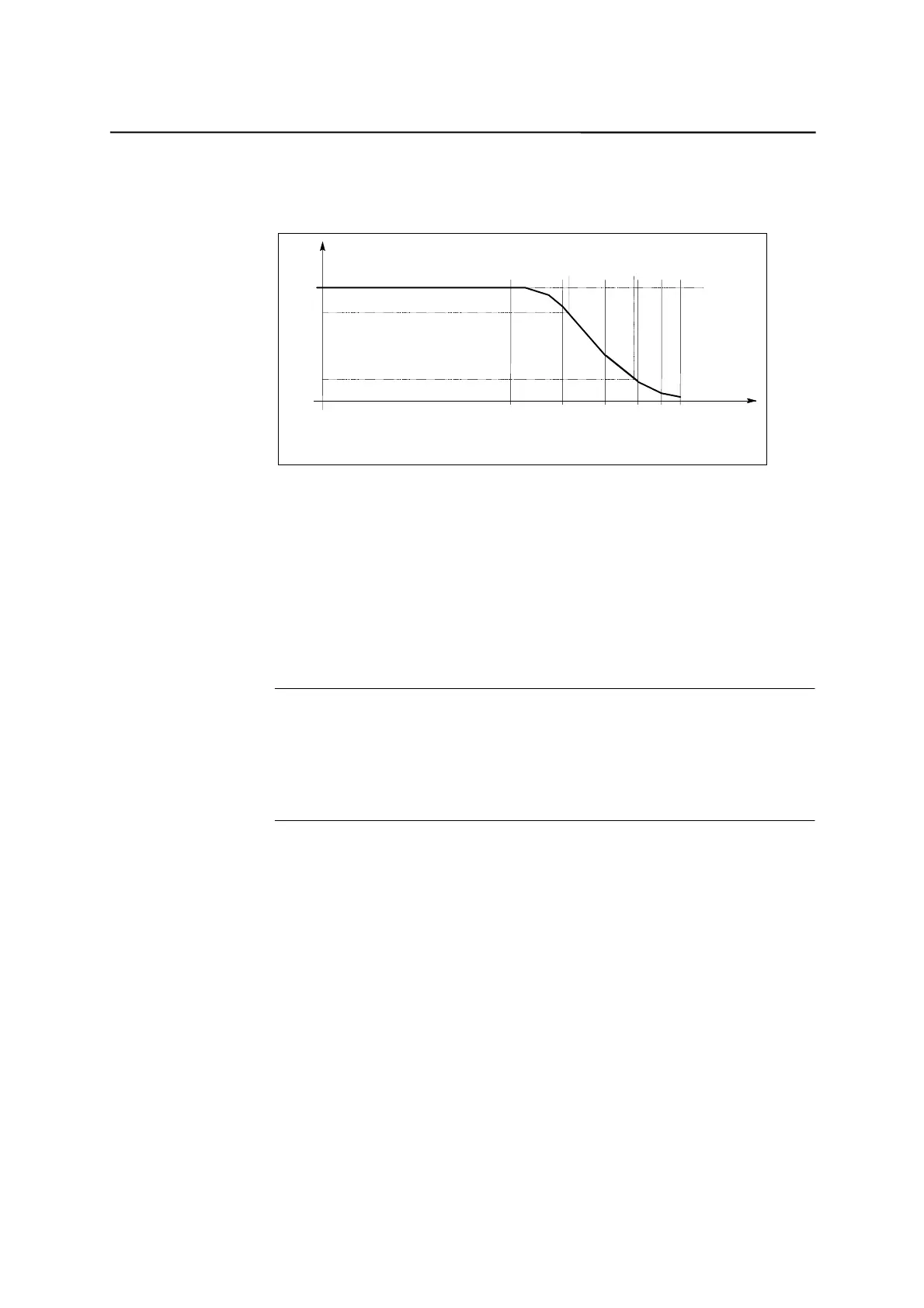
Bent acceleration characteristic
A characteristic feature of stepper motor drives is the drop of the available
torque in the upper speed range (see Fig. 4–6).
M
max
Stepper motor
n
red
n
max
25
4,000 r.p.m.
n [%]
1 10 20 40 60 80 100
M
[Nm]
n
red
: Reducing speed
n
max
:Maximum speed
Fig. 4-6 Typical motor characteristic for step-switching drives
The optimum capacity utilization of such characteristics with a simultaneous
overload protection can be achieved using the velocity-dependent acceleration
characteristic ”Bent acceleration characteristic“.
Activation
In the AUTOMATIC mode, the bent acceleration characteristic is always active.
The axis behavior is set via the parameterization of the characteristic.
For single motions in JOG mode, the bent acceleration characteristic can be
enabled via MD 35240 MA_ACCEL_TYPE_DRIVE = 1 (default value=0).
Notice
z
The bent acceleration characteristic can only be parameterized axis-
related. The path traversing behavior results from the caluclation using
the axes involved.
z
MD 32420 JOG_AND_JERK_ENABLE=0
Prerequisite for action of the bent acceleration characteristic in JOG.
Parameterization of the axis characteristic
The axial course of the acceleration characteristic must be parameterized
using the following machine data:

 Loading...
Loading...









