3.3 Using External Compass
Normally, the accurate operation of a self-con-
tained autopilot is very difficult on a ferrous
hulled boat (steel, ferro cement etc) as the hull
will affect the bearing read by the internal flux-
gate compass.
Although the TP20 and TP30 Tillerpilots oper-
ates using a built-in fluxgate compass, they have
the facility to accept data from an external source
- the ECP30 active compass.
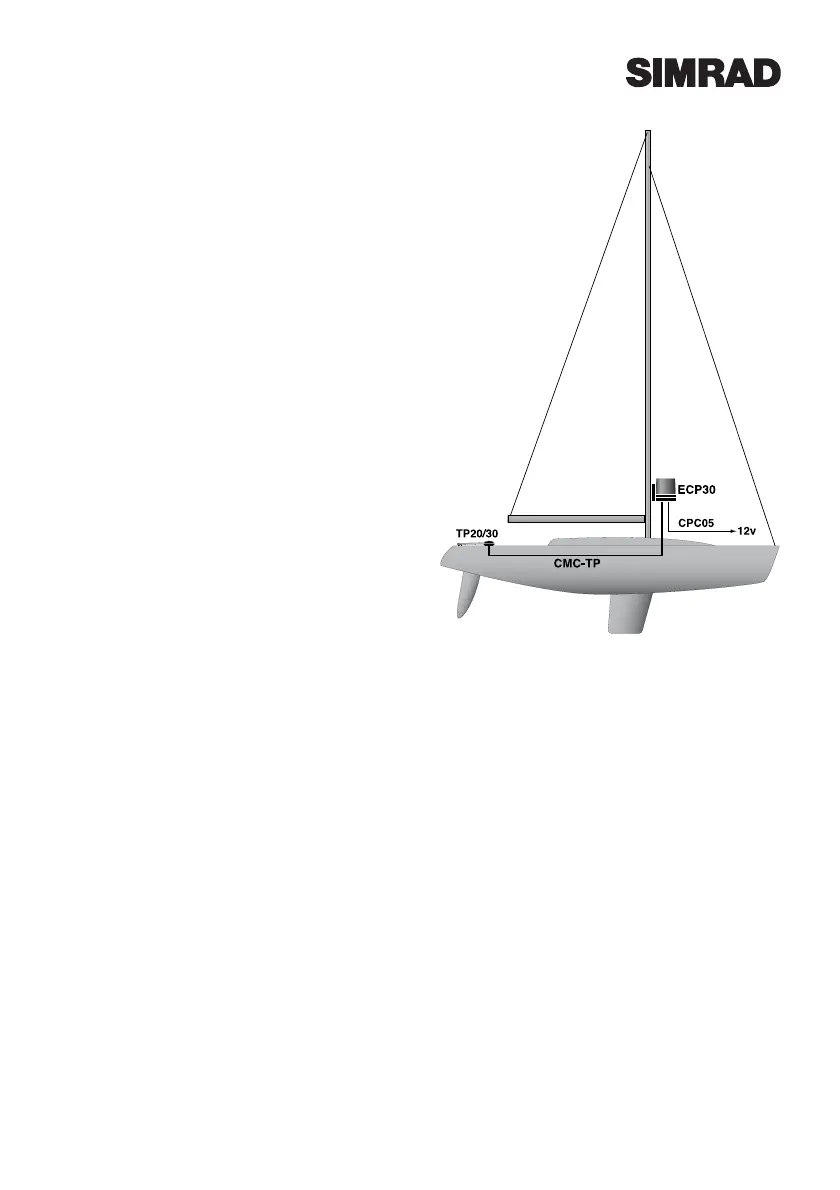
On a steel or ferro hulled boat, the correct loca-
tion for the ECP30 would be on the mast,
between 1 and 2 metres above the deck (Fig 3.5).
On a non-ferrous hulled boat, the ECP30 should
be situated low down ,as near the centre point
of the boat as possible, but away from any
sources of magnetic interference such as speak-
ers etc.
The ECP30 is connected to the Tillerpilot via the
Canbus connection (pins 3 & 4 - refer to section
5.2). Note that in order to operate, the ECP30
will require a separate 12v power supply
through a CPC02 or CPC05 power cable.
Once connected, the Tillerpilot will automati-
cally accept bearing data from the ECP30 active
compass transducer in preference to the inter-
nal fluxgate compass.
Fig 3.5 - Using TP20 / TP30 with external compass
Page 13