Page 19
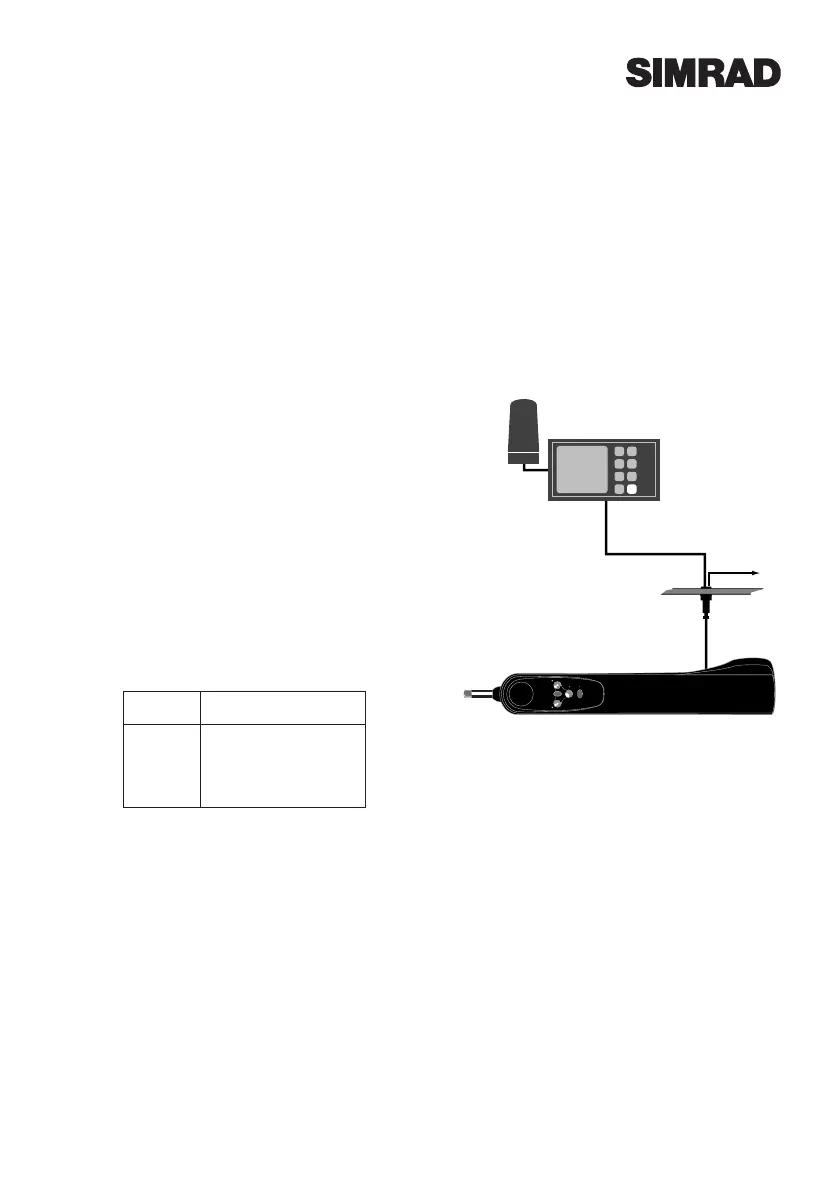
The Tillerpilot is linked to the ECP30 external com-
pass via a connecting lead CMC-TP (not supplied),
which is wired to the Tillerpilot bulkhead socket’s
Canbus input (terminals 3 & 4), and then plugged into
the Compass.
The CMC-TP is used purely to supply Canbus data to
the Tillerpilot, and does not carry any power supply.
The ECP30 must always have it’s own 12v power
supplied via a CPC02 or CPC05 Power Cable.
5.3 Interfacing Via NMEA
The Tillerpilot’s state-of-the-art electronics include a
built-in NMEA processor, which means that
NMEA0183 compatible equipment can be connected
directly to the Wheelpilot, without any need for a sep-
arate interface unit (Fig 5.6).
Due to the vast number of different manufacturers and
models of navigational equipment, Simrad cannot
guarantee correct operation and installation of this
equipment. Therefore, before connecting any equip-
ment to the Tillerpilot it is important that the unit’s
manual is referred to with regard to interfacing via
NMEA.
When connecting to the Tillerpilot’s NMEA interface,
two wires are used - a DATA wire and a COMMON
(Com) wire. These should be connected to the six-pin
bulkhead socket as follows:
It should be noted that some manufacturer’s equip-
ment does not have a dedicated Common connection.
In this case, the DATA connection will usually be
labelled NMEA OUT, and the NMEA Common con-
nection on the Tillerpilot (terminal 5) should be con-
nected directly to 0v (terminal 2). If in any doubt,
refer to the manufacturer, or Simrad’s Product
Support department for advice.
If a navigational receiver (GPS etc) is connected to the
Tillerpilot, it can extract the NMEA sentences neces-
sary for the Nav Mode function to operate. Other
functions such as Sail To Wind may also be available if
NMEA0183 compatible equipment transmitting the
correct NMEA sentences is interfaced.