Rev E June 2023
Page 32
Chapter 5 PC Operation - Tutorial
The Kinesis software will be used throughout the rest of this tutorial to interface with
the piezo inertia motor controller.
5.3 Zeroing
To establish a datum from which subsequent position moves can be measured, move
the motor to the required zero position, and then click the ZERO button on the GUI
panel. The motor can also be zeroed from the hardware unit by using the Zero Axis
menu option (see Section 4.3.1.).
5.4 Moving to a Position
Moves are measured in the number of steps, relative to the zero position and can be
performed only on 1 channel at a time.
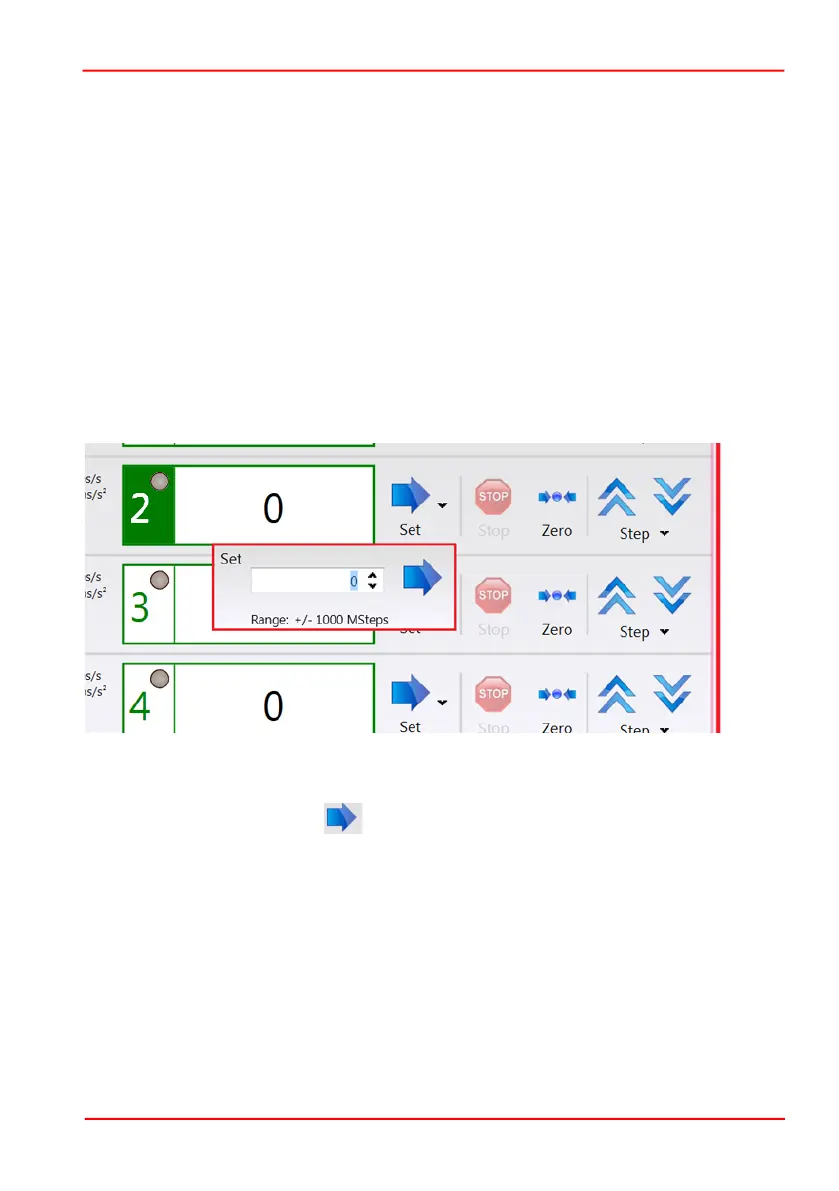
1) Click the ‘Set’ arrow, next to the position display for the required channel.
Fig. 5.2 Position Popup Window
2) Enter the required number of steps into the pop up window, e.g. 128
3) Click the arrow button . Notice that the position display counts up to 128 to
indicate a move to the absolute position commanded.
5.5 Changing Motor Parameters
The velocity settings shown to the left of the main display relate to the maximum
velocities at which a move is performed, and the acceleration at which the motor
speeds up from zero to maximum velocity. The values are entered for each channel
in the Drive Settings entered in the Settings panel (see Section 6.3.3.).