Working Principle
The L1 radar mainly consists of the laser emission and ranging core, reflector, high-speed rotating
motor, and low-speed rotating motor. In the working state, as shown in the diagram, the rotating
directions of the high-speed and low-speed rotating motors are as shown in the figure.
The communication and power supply interfaces of the L1 are connected through a conversion
module, which includes a power supply port and a Type-C port. Users can supply power through a
power adapter and obtain scanning ranging data through the Type-C port. The L1 is equipped with a
conversion module, power adapter, and data cable for users, eliminating the need for a complex
power supply system and debugging cables, reducing usage costs.
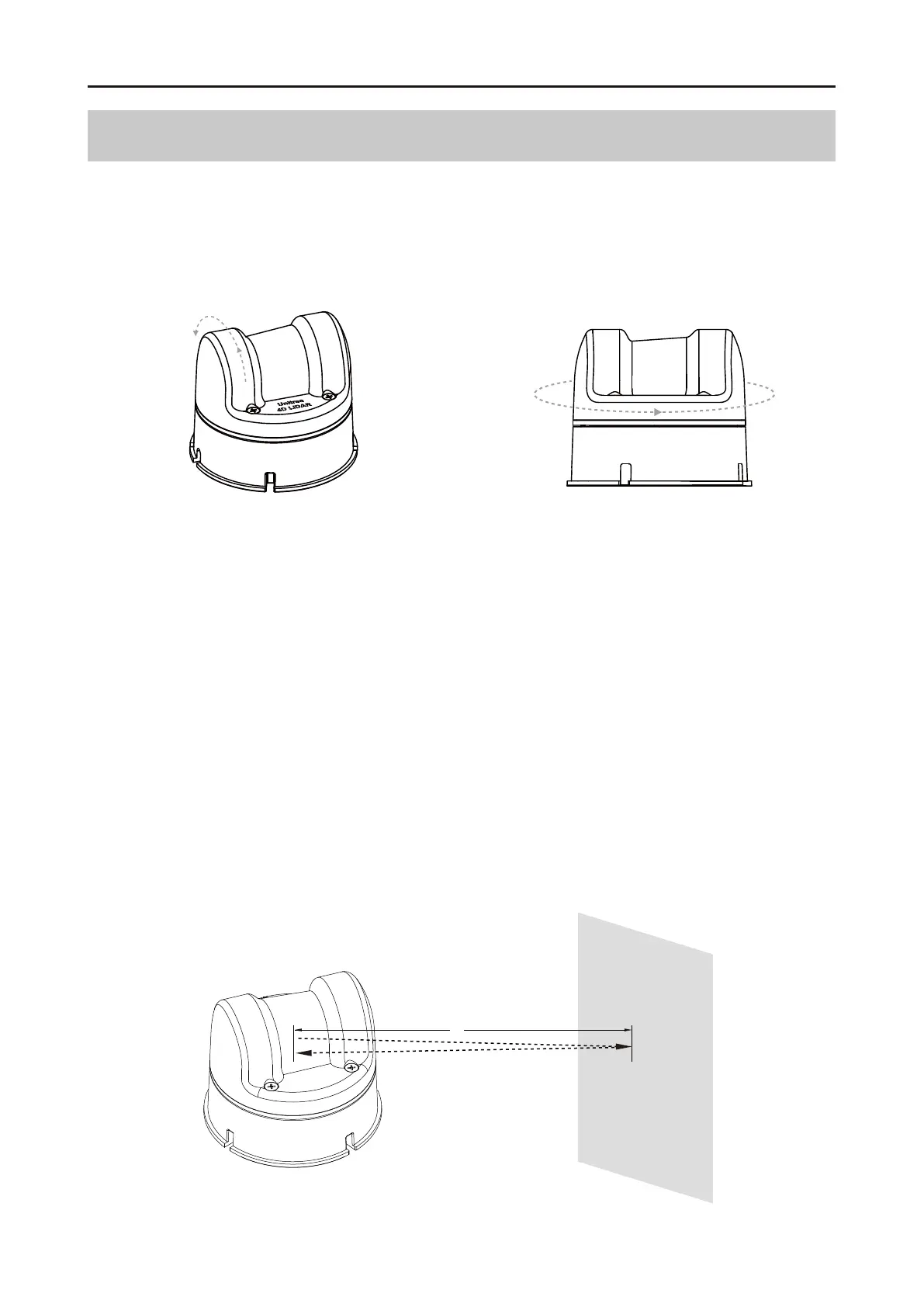
The L1 uses laser flight time ranging technology, combined with a high-speed laser acquisition and
processing system, to achieve a ranging action of 21,600 times per second. In each ranging action,
the L1 emits ns-level narrow-pulse infrared laser signals. The reflected light from the target object is
received by the radar's laser acquisition system, and after analysis and processing by the processor,
the distance value and current angle information between the illuminated target object and the L1
are output from the communication interface.
3
2023 Unitree Robotics. All rights reserved.
Unitree4D LiDAR-L1 User Manual
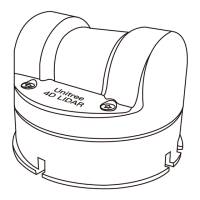
Schematic Diagram of Working Principle
Direction of High-Speed Motor Rotation Direction of Low-Speed Motor Rotation
d