Go2 User Manual
© 2023 All rights reserved, Unitree Robotics 16
Go2 Use the companion remote control to control Go2
Step1: Turn on the ISS in the mobile phone App
a) Open Unitree Go App to connect Go2.
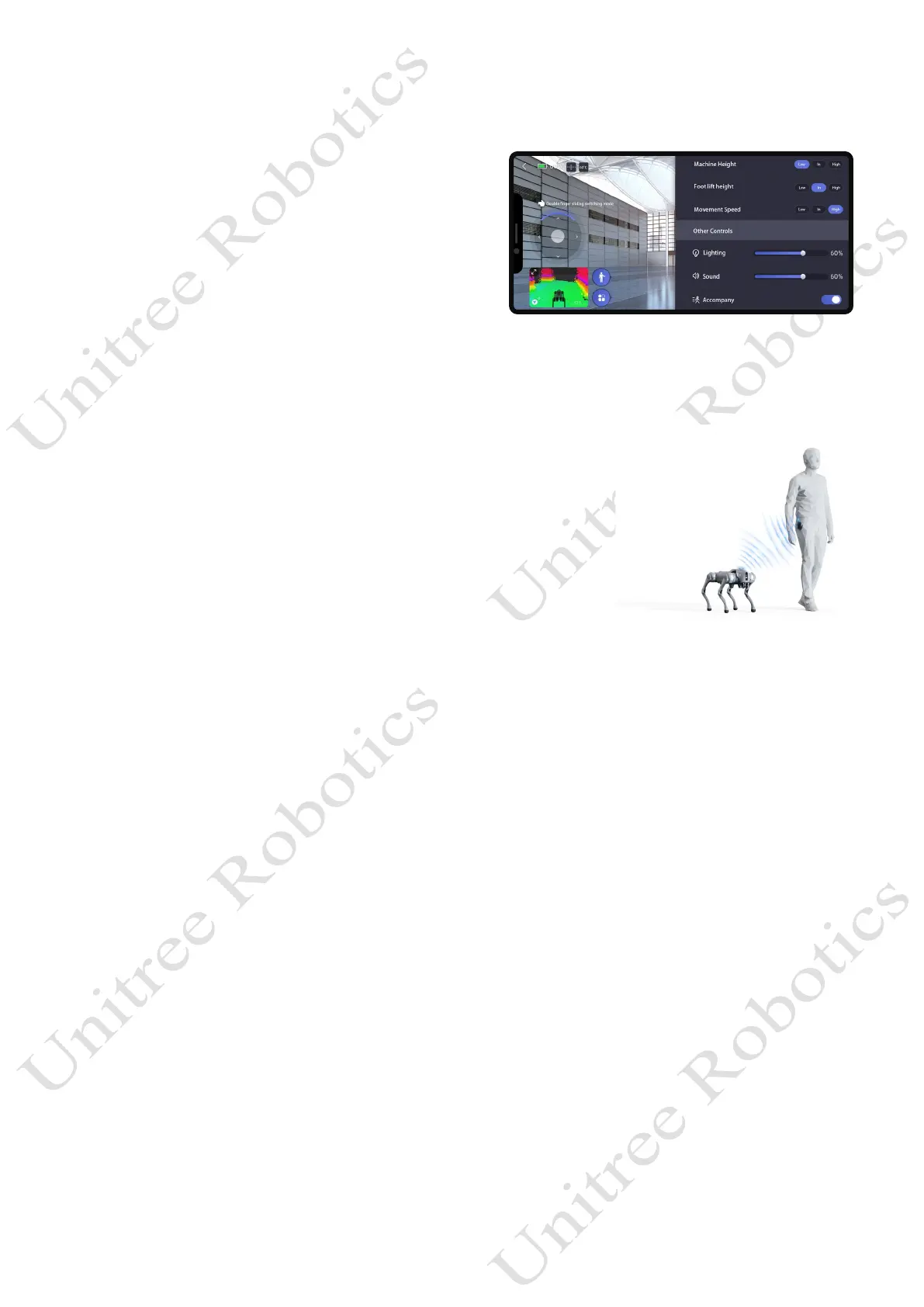
b) Open the manipulation interface -settings on upper
right corner - motion status adjustment - side following.
c) Press OFF to turn on the side-following function.
Step2: Wear and start the companion remote control.
a) Buckle the remote control to the right side of the human body on the belt, stand on the left side of the
robot, and keep your torso facing the same direction as the robot.
b) Short press the power button of the companion remote control, when the indicator light is on steadily
the startup is finished, at this time the remote control is in rocker mode.
Step3: Start the side-following mode (Important step!)
a) Short press the M button twice to start the slow auto-following
mode, the maximum speed at 1.5m/s.
b) In slow auto-following mode, short press M button twice to enter
fast auto-following mode with maximum speed at 3.0m/s.
Step4: Turn on/off obstacle avoidance function
Short press L2 button twice to turn on the obstacle avoidance; short press once to turn off the
obstacle avoidance.
Step5: Switch off the auto-following function
a) Short press M button once: stop following and enter the rocker control mode.
b) Switch on the rocker: Toggle the rocker to stop the follow mode immediately and enter the rocker
mode.
c) Switch off: Long press the power button of the companion remote control for 2 seconds to switch off.
d) Horizontal Placement: Place the companion remote control horizontally.
Other operating instructions (For adjusting the machine)
a) Rocker control: When the companion remote control enters the rocker mode, the robot movement can
be controlled by the rocker. Using the rocker control mode, the remote control can be taken off the belt for
control. If you need to continue to use auto-follow after the remote control is taken off, you need to put the
remote control on and then turn on the accompaniment.
b) Stand up, Down, Damped Mode:Short press 2 times consecutively, the robot switches cyclically
between Down, Damped and Stand up modes.
c) Side roll: When the robot rolls over on its side, press and hold for 1 second to resume standing.