When performing the application risk assessment, it is necessary to take into account the motion
of the robot after a stop has been initiated. In order to ease this process, the safety functions
Stopping Time Limit and Stopping Distance Limit can be used.
These safety functions dynamically reduces the speed of the robot motion such that it can always
be stopped within the limits. The joint position limits, the safety planes and the tool/end effector
orientation limits take the expected stopping distance travel into account i.e. the robot motion will
slow down before the limit is reached.
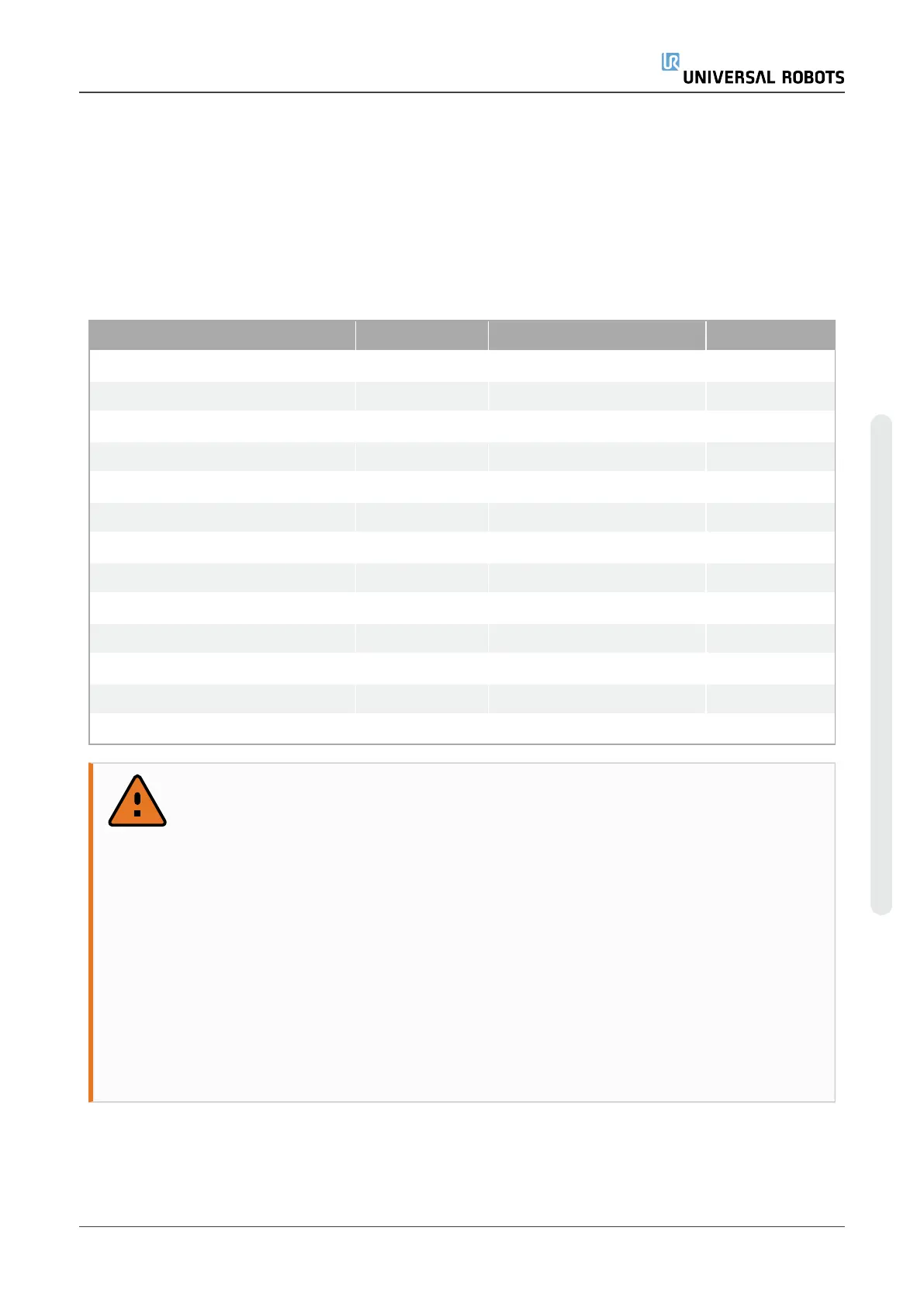
The functional safety can be summarized as:
Safety Function Accuracy Performance Level Category
Emergency Stop – d 3
Safeguard Stop – d 3
Joint Position Limit 5° d 3
Joint Speed Limit 1.15°/s d 3
Safety Planes 40mm d 3
Tool Orientation 3° d 3
Speed Limit 50mm/s d 3
Force Limit 25N d 3
Momentum Limit 3kg m/s d 3
Power Limit 10W d 3
Stopping Time Limit 50ms d 3
Stopping Distance Limit 40mm d 3
Safe Home 1.7° d 3
WARNING
There are two exceptions to the force limiting function that are important when
designing an application (Figure Due to the physical properties of the robot arm,
certain workspace areas require attention regarding pinching hazards. One area
(left) is defined for radial motions when the wrist 1 joint is at least mm from the
base of the robot. The other area (right) is within mm of the base of the robot,
when moving tangentially.). As the robot stretches out, the knee-joint effect can
give high forces in the radial direction (away from the base) at low speeds.
Similarly, the short leverage arm, when the tool/end effector is close to the base
and moving around the base, can cause high forces at low speeds. Pinching
hazards can be avoided by removing obstacles in these areas, placing the robot
differently, or by using a combination of safety planes and joint limits to eliminate
the hazard by preventing the robot moving into this region of its workspace.
Hardware Manual 17 UR5e
2.Safety-related Functions and Interfaces
Copyright © 2009–2022 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










