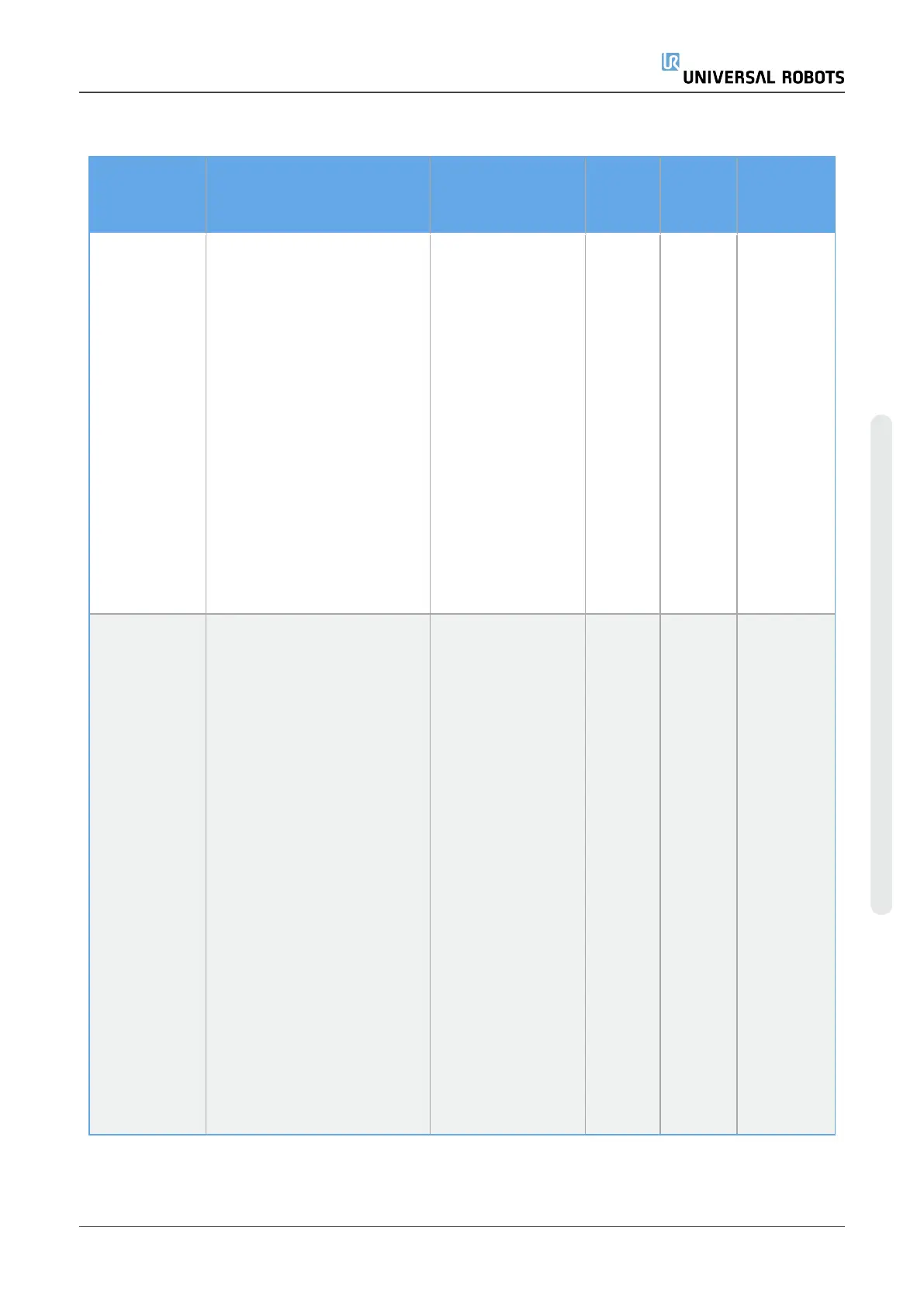
SF# and
Safety
Function
Description What happens?
Tole-
rance
PFHd Affects
SF1
1,2,3,4
Emergency
Stop
(according to
ISO 13850)
Pressing the Estop PB on
the pendant or the External
Estop (if using the Estop
Safety Input) results in a
Cat 1 stop with power
removed from the robot
actuators and the tool I/O.
Command1 all joints to
stop and upon all joints
coming to a monitored
standstill state, power is
removed. See Stop Time
and Stop Distance Safety
Functions. ONLY USE FOR
EMERGENCY PURPOSES,
not safeguarding.
Category 1 stop
(IEC 60204-1)
- 1.30E-
07
Robot
including
robot tool
I/O
SF2
Safeguard
Stop4
(Protective
Stop
according to
ISO 10218-1)
This safety function is
initiated by an external
protective device using
safety inputs that initiate a
Cat 2 stop3. The tool I/O
are unaffected by the
safeguard stop. Various
configurations are
provided. If an enabling
device is connected, it's
possible to configure the
safeguard stop to function
in automatic mode ONLY.
See the Stop Time and
Stop Distance Safety
Functions4 . For the
functional safety of the
complete integrated safety
function, add the PFHd of
the external protective
device to the PFHd of the
Safeguard Stop.
Category 2 stop
(IEC 60204-1) SS2
stop (as described
in IEC 61800-5-2)
- 1.20E-
07
Robot
Hardware Manual 89 UR5e
15.Safety Functions Tables
Copyright © 2009–2022 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










