All rights reserved 9 Installation Guide (en) 1.3.3
6. Programming
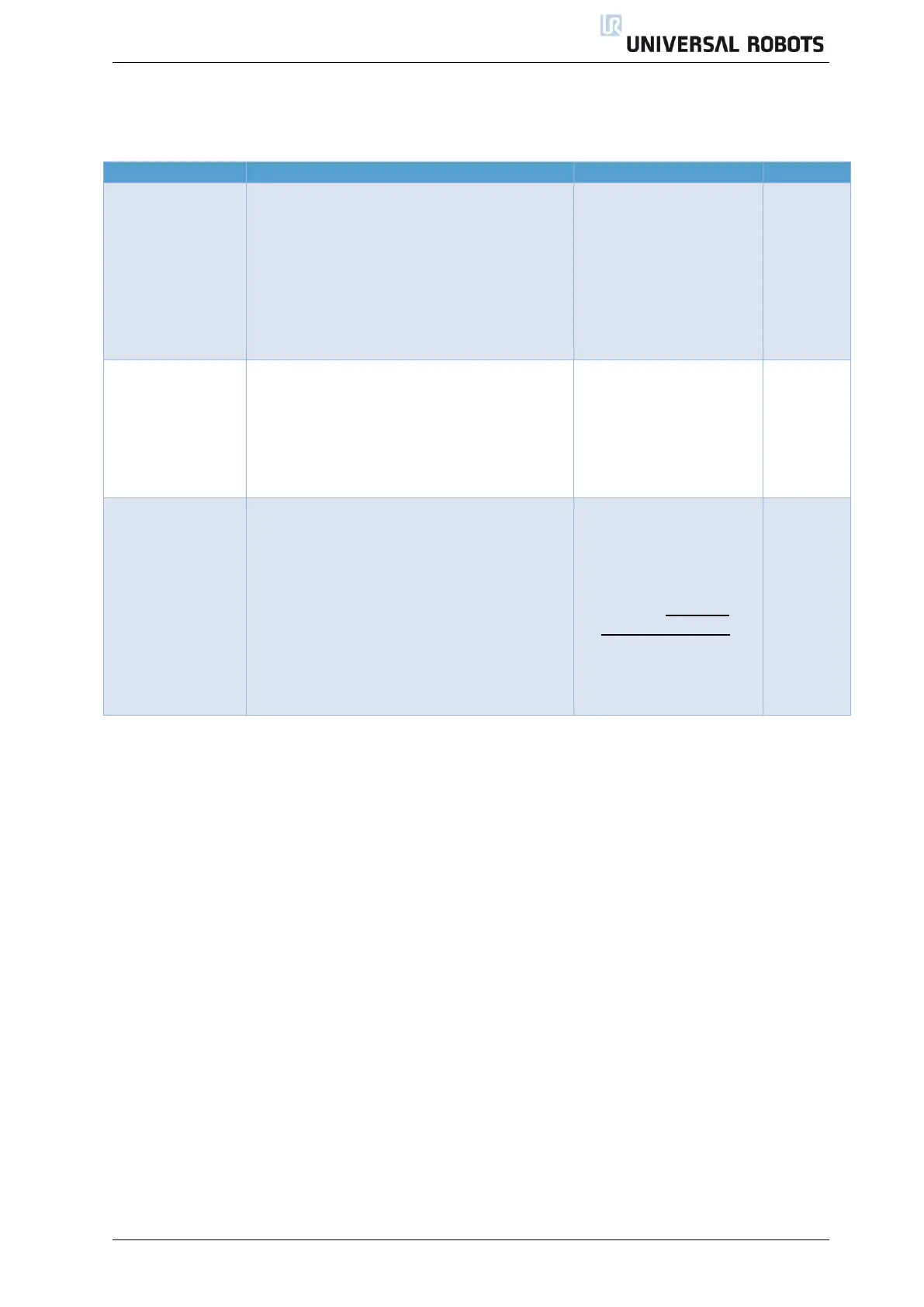
6.1 Processing
Threads or
Events used in
the program?
YES
NO
Many parallel or computationally-
intensive processes can put additional
strain on the robots control software. The
use of threads should be carefully
considered, and overuse might cause
the PolyScope GUI to seem slow and
unresponsive. Efficient programming is
important.
UR User Manual
Chapter ”Event” &
”Thread”
Verify that switch case statements are
used in a non-stressful way on robot.
Do not use blend in last or first
waypoints in cases. It could cause
problems when jumping through cases.
UR User Manual
Chapter “Switch“
Does robot
show “runtime
error / infinite
loop”?
YES
NO
This error happens due to the fact, that
all operations do not necessarily use
physical time code segments that
execute only one command repeatedly
might cause the runtime interpreter to
view this command sequence as an
infinite loop.
Use wait command or sync() function for
avoiding runtime errors.
UR Script Manual
function “sync()”
UR Support Site
Article “Runtime
error/Infinite loop”