上海维宏电子科技股份有限公司
SHANGHAI WEIHONG ELECTRONIC TECHNOLOGY CO., LTD.
70 / 116
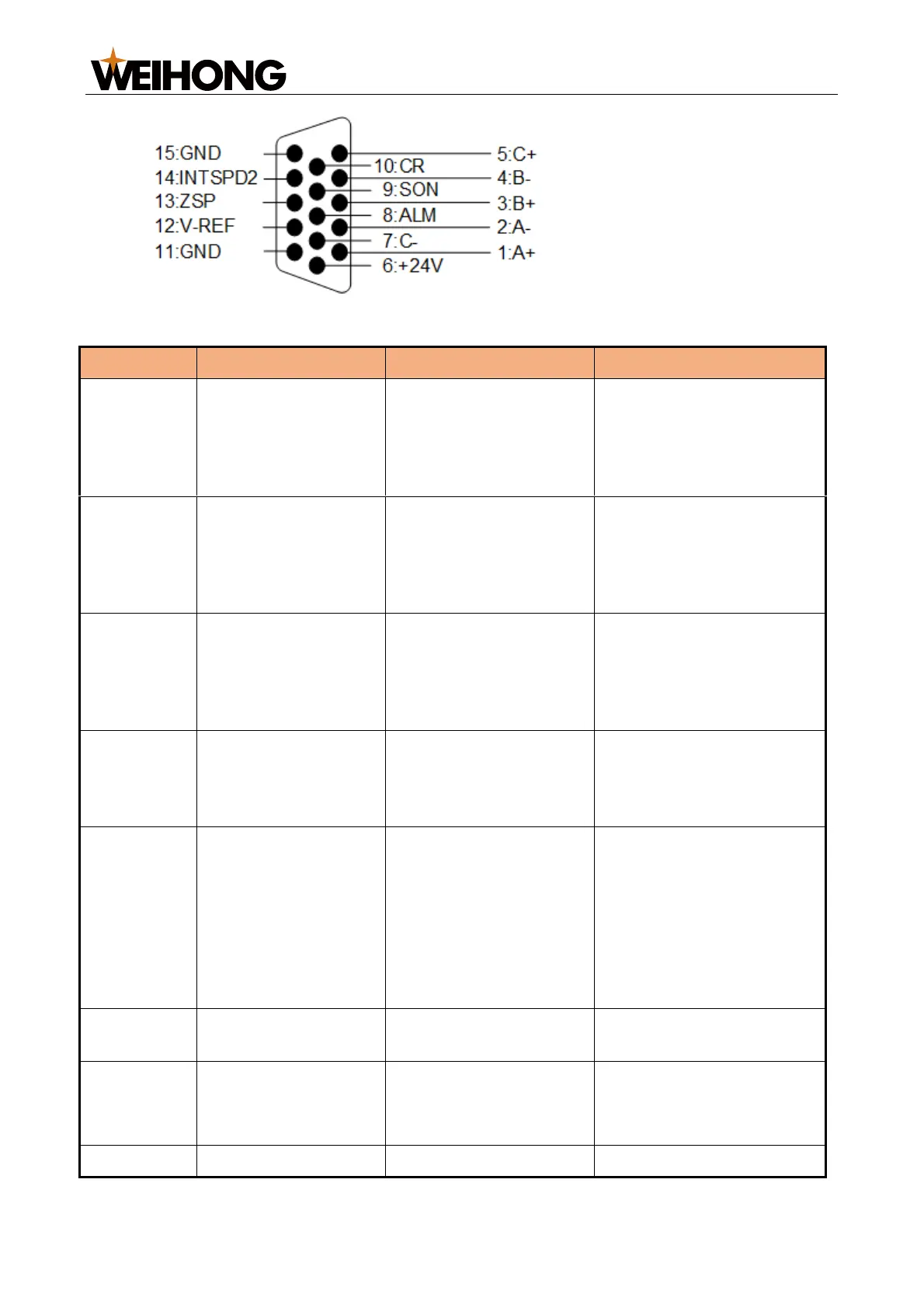
Descriptions of the holes and signals are as follows:
Feedback signal of
encoder phase A
Input
Differential signal
transmission mode
It is used to receive the
differential output of
encoder phase A signal
from drive frequency
divider (equal to RS422).
Feedback signal of
encoder phase B
Input
Differential signal
transmission mode
It is used to receive the
differential output of
encoder phase B signal
from drive frequency
divider (equal to RS422).
Feedback signal of
encoder phase C
Input
Differential signal
transmission mode
It is used to receive the
differential output of
encoder phase C signal
from drive frequency
divider (equal to RS422).
When the drive detects
failure, this output
(transistor) switch will be
closed or disconnected.
It is used to turn on
(power on) and turn off
(power off) servo motor.
When it is connected to
COM, dynamic brake will
be released and the drive
is allowed to work (servo
enabled).
It is used to remove
alarms/warnings.
Output
Differential signal
transmission mode