Magnetic Calibration Manual
Xsens MTi User Manual Repository
Magnetic Calibration Manual
Copyright © 2021 Xsens Page 5
assumptions about the application. This is the task of the Xsens Kalman Filter (XKF) or
Xsens Estimation Engine (XEE) running inside the on-board processor of the MT.
Static disturbances. These disturbances are often caused by mounting the MT to an2.
object of which the motion is to be recorded (the MT moves with the object). The error in
the magnetic field is constant, and can therefore be predicted (i.e., it is deterministic)
and taken into account during motion tracking. By mapping the disturbance (warping) of
the magnetic field, the errors caused by this type of disturbance can in theory be
reduced to zero. The calculations and methodology required to achieve this are supplied
by this Magnetic Calibration Manual. This type of correction is also commonly known as
compensation for hard and soft iron effects.
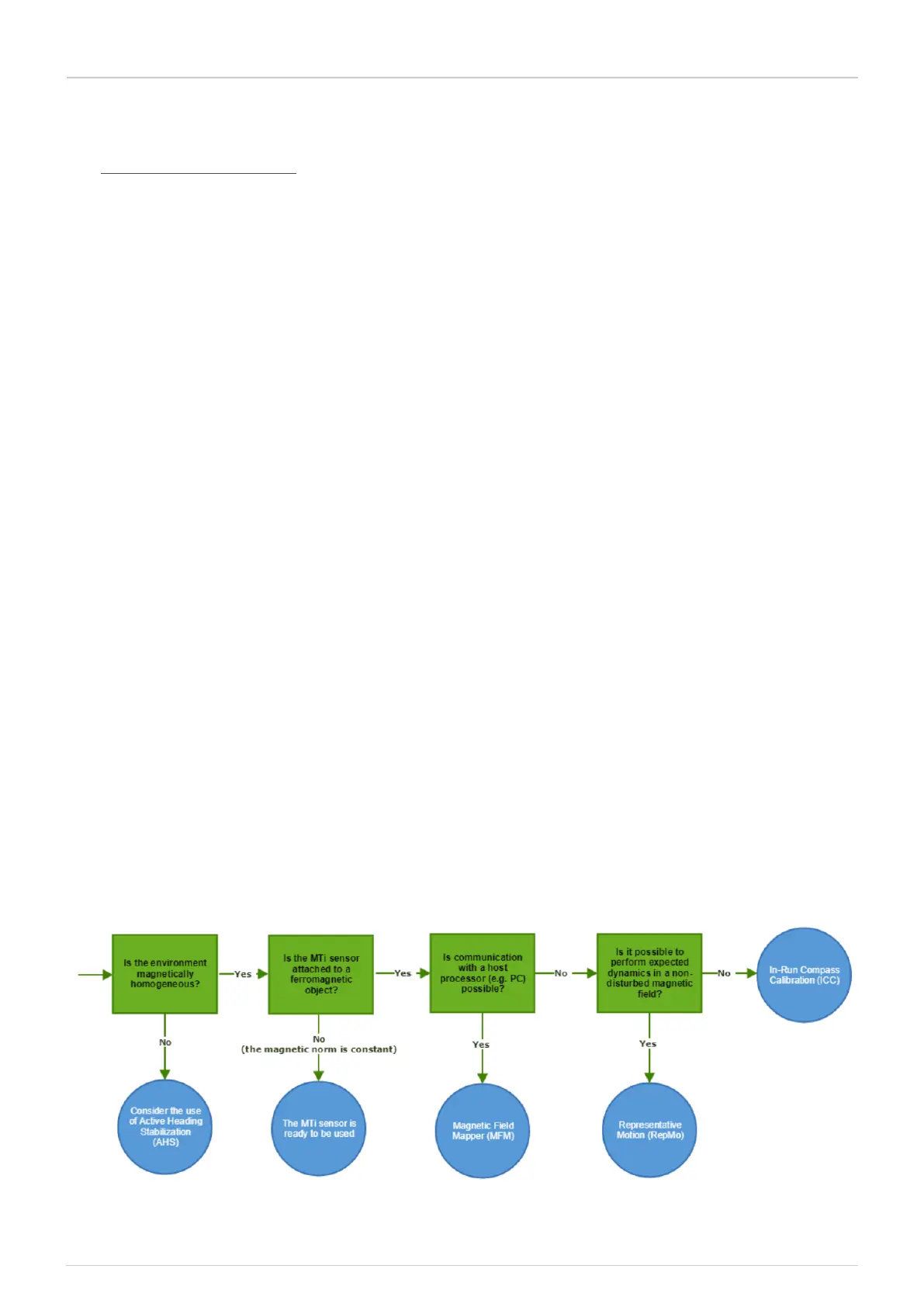
Disturbances of the first type cannot be calibrated for. Instead, you may want to consider the
use of Active Heading Stabilization (AHS) as an alternative. Refer to the following article for
more information: Active Heading Stabilization (AHS)
Disturbances of the second type can be calibrated for. This document describes three tools
that can be used to achieve this:
Magnetic Field Mapper (MFM): This is the most powerful and therefore preferred1.
calibration procedure.
Representative Motion (RepMo): An embedded solution that can be used to achieve2.
a fast and effective magnetic calibration in situations where a connection with a host PC
is not possible.
In-Run Compass Calibration (ICC): An embedded solution that can perform a3.
continuous on-board magnetic calibration.
The figure below presents a flow chart that can help you decide which tool to use.
 Loading...
Loading...