22
YASKA WA
|
YASKAWA AC Drive CR700 Catalog
|
KAEP C710617 24
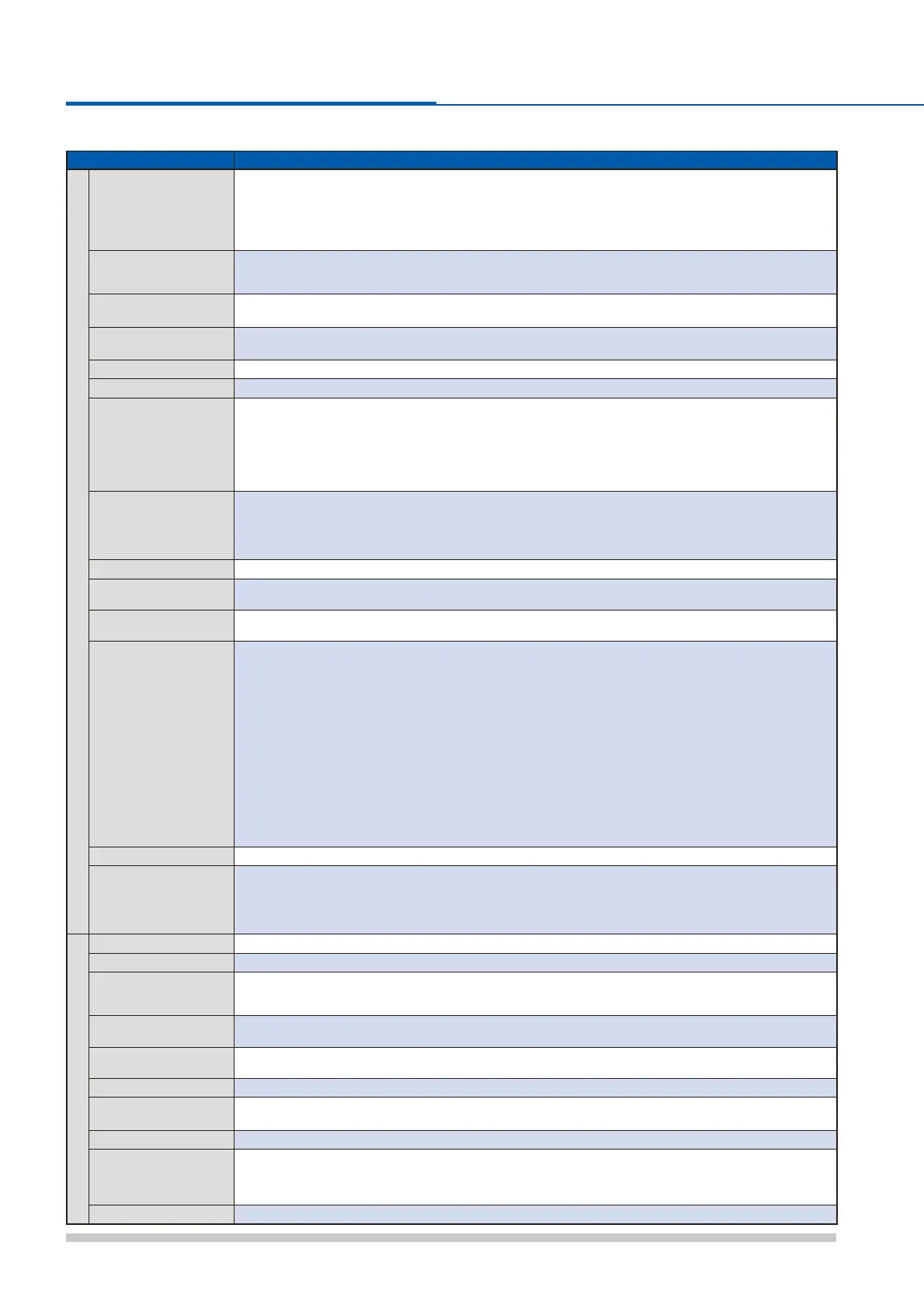
Item Speci cations
Control Characteristics
Control Method
The following controls are selected by parameters.
・
V/f Control
・
Closed Loop V/f Control
・
Open Loop Vector Control
・
Closed Loop Vector Control
・
Advanced Open Loop Vector Control
Maximum Output
Frequency
・
Advanced Open Loop Vector Control
:
120 Hz
・
Closed Loop V/f Control, Closed Loop Vector Control
:
400 Hz
・
V/f Control, Open Loop Vector Control
:
590 Hz
Frequency Accuracy
(
Temperature Fluctuation
)
Digital reference
:
within
±
0.01% of the max. output frequency
(
−
10˚C to
+
40˚C
)
Analog reference
:
within
±
0.1% of the max. output frequency
(
25˚C
±
10˚C
)
Frequency Setting
Resolution
Digital reference
:
0.01 Hz
Analog reference
:
1/2048 of the maximum output frequency setting
(
11 bit plus sign
)
Output Frequency Resolution
0.001 Hz
Frequency Setting Resolution
Main frequency reference
:
−
10 to
+
10 Vdc, 0 to 10 Vdc
(
20 k
Ω
)
,
4 to 20 mA
(
250
Ω
)
,
0 to 20 mA
(
250
Ω
)
Starting Torque
・
V/f Control
:
150%/3 Hz
・
Closed Loop V/f Control
:
150%/3 Hz
・
Open Loop Vector Control
:
200%/0.3 Hz
・
Closed Loop Vector Control
:
200%/0 min
-1
・
Advanced Open Loop Vector Control
:
200%/0.3 Hz
Note
:
Drive capacity must selected appropriately to obtain this starting torque under Open Loop Vector Control,
Closed Loop Vector Control, and Advanced Open Loop Vector Control.
Speed Control Range
・
V/f Control 1
:
40
・
Closed Loop V/f Control 1
:
40
・
Open Loop Vector Control 1
:
200
・
Closed Loop Vector Control 1
:
1500
・
Advanced Open Loop Vector Control 1
:
200
Zero Speed Control Possible in Closed Loop Vector Control.
Torque Limit
Parameter settings allow separate limits in four quadrants in Open Loop Vector Control, Closed Loop Vector Control,
and Advanced Open Loop Vector Control.
Accel/Decel Time
0.0 s to 6000.0 s
The drive allows four selectable combinations of independent acceleration and deceleration settings.
Braking Torque
Approx.
20%
Approx.
125% with a dynamic braking option
・
Short
-
time average deceleration torque
Motor capacity
0.4/0.75 kW
:
over 100%
Motor capacity
1.5 kW
:
over 50%
Motors
2.2 kW and larger
:
over 20%, Overexcitation Braking allow for approx. 40%
・
Continuous regenerative torque
:
Approx. 20%. Dynamic braking option allows for approx. 125%, 10% ED, 10 s
Note
:
・
Catalog codes CR70
□
2003 to 2115 and 4002 to 4150 have a built
-
in braking transistor.
・
Set L3
-
04
=
0
[
Disabled
]
(
default setting
)
when connecting the regenerative converter, regenerative unit, braking
unit and braking resistor unit. The drive may not stop within the speci ed deceleration time if L
3
-
04 is changed to 1
through
5
[
Enabled
]
.
・
Short
-
time deceleration torque refers to the torque required to decelerate the motor
(
uncoupled from the load
)
from
the rated speed to zero. Actual speci cations may vary depending on motor characteristics.
・
Continuous regenerative torque and short
-
time deceleration torque for motors 2.2 kW and larger vary depending on
motor characteristics.
V/f Characteristics Select from
15 prede ned V/f patterns, or a user
-
set V/f pattern.
Main Control Functions
Droop Control, Feed Forward Control, Zero Servo Control, torque limit,
9 Step Speed
(
max.
)
, accel/decel switch,
S
-
curve accel/decel, Auto
-
Tuning
(
rotational, stationary
)
, cooling fan on/off switch, slip compensation, torque
compensation, Frequency Jump, Upper/lower limits for frequency reference, Injection Braking at start and stop,
Overexcitation Deceleration, MEMOBUS/Modbus communications.
(
RS
-
485
, max. 115.2 kbps
)
, Parameter Backup
Function, Online Tuning, Overexcitation Deceleration, Inertia Tuning and ASR Tuning, Crane Sequence, etc.
Protection Function
Motor Protection Motor overheat protection based on output current
Momentary Overcurrent Protection
Drive stops when output current exceeds 200% of rated output current.
Overload Protection
Drive stops after
60 s at 150% of rated output current.
Note
:
The drive may trigger the overload protection function at
150% of the drive rated output in under 60 s if the
output frequency is less than
6 Hz.
Overvoltage Protection
200 V class
:
Stops when DC bus exceeds approx. 410 V
400 V class
:
Stops when DC bus exceeds approx. 820 V
Undervoltage Protection
200 V class
:
Stops when DC bus falls below approx. 190 V
400 V class
:
Stops when DC bus falls below approx. 380 V
Heatsink Overheat Protection
Thermistor
Braking Resistance
Overheat Protection
Overheat sensor for braking resistor
(
optional ERF
-
type, 3% ED
)
Stall Prevention Stall prevention during acceleration/deceleration and constant speed operation
Ground Fault Protection
Protection by electronic circuit
Note
:
Protection may not be provided under the following conditions as the motor windings are grounded internally during run
:
Low resistance to ground from the motor cable or terminal block.
Drive already has a short
-
circuit when the power is turned on.
Charge LED Charge LED remains lit until DC bus has fallen below approx. 50 V
Common Speci cations
Standard Speci cations

 Loading...
Loading...





