9.4 Serial Converter Unit
9.4.2 Characteristics and Specifications
9
Cables and User-Assembled Wiring Materials for Linear Servomotors
9-31
9.4.2
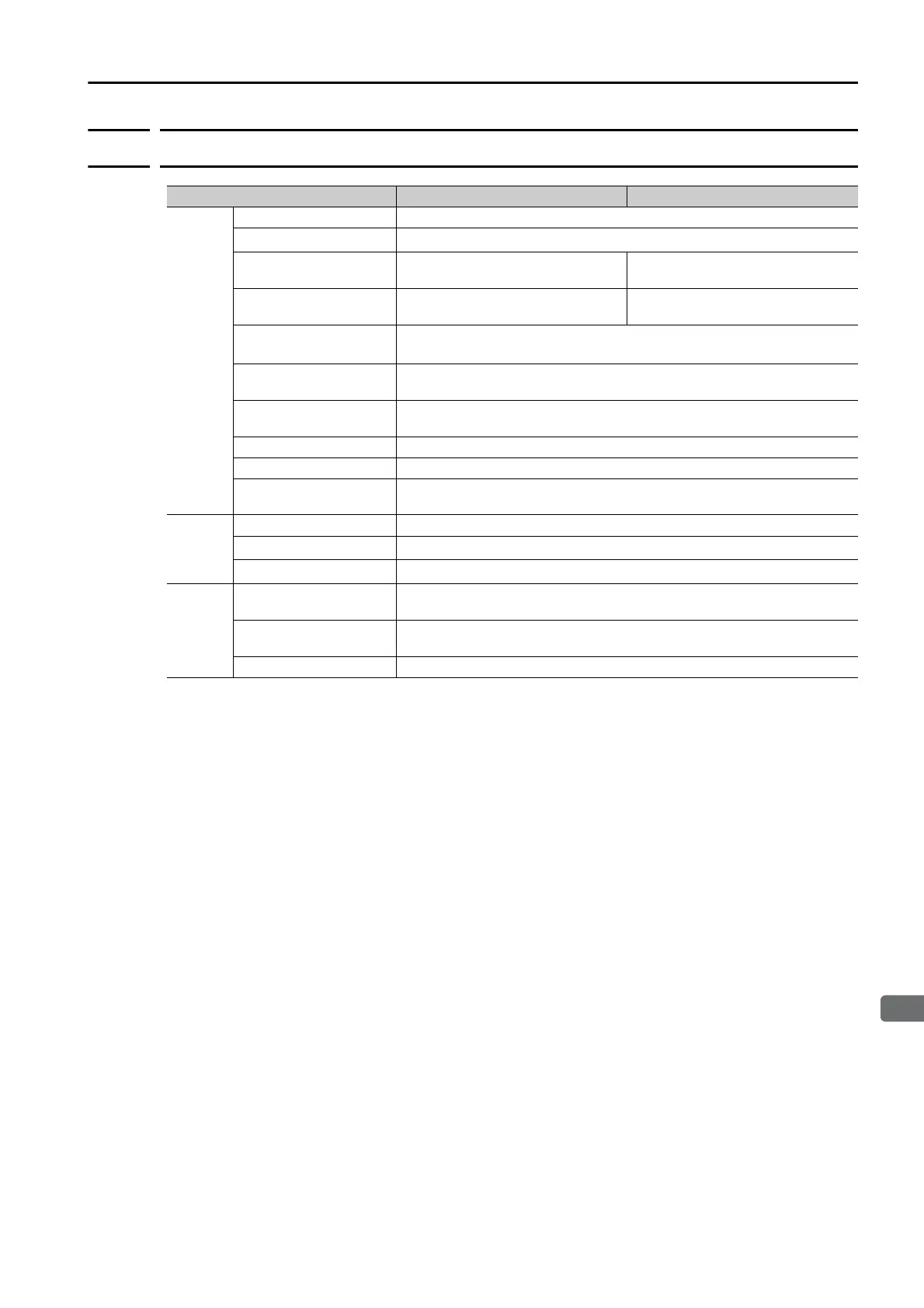
Characteristics and Specifications
*1. The current consumptions of the Linear Encoder and the polarity sensor are not included in this value.
The current consumption of the polarity sensor is approximately 40 mA. Confirm the current consumption of the
Linear Encoder that you will use and make sure that the current capacity of the SERVOPACK is not exceeded.
*2. If you input an out-of-range value, the correct position information will not be output. Also, the device may be
damaged.
*3. Only SGLFW2 Servomotors come equipped with thermal protectors.
Item JZDP-H00- JZDP-J00-
Electri-
cal
Specifi-
cations
Power Supply Voltage +5.0 V ±5%, ripple content: 5% max.
Current Consumption
*1
120 mA Typ, 160 mA max.
Signal Resolution
1/256 pitch of input two-phase sine
wave
1/4,096 pitch of input two-phase
sine wave
Maximum Response
Frequency
250 kHz 100 kHz
Analog Input Signals
*2
(cos, sin, and Ref)
Differential input amplitude: 0.4 V to 1.2 V
Input signal level: 1.5 V to 3.5 V
Polarity Sensor Input
Signal
CMOS level
Thermal Protector Input
Signal
Connect the thermal protector built into the Linear Servomotor
*3
Output Signals Position data, polarity sensor information, and alarms
Output Method Serial data transmission
Output Circuit
Balanced transceiver (SN75LBC176 or the equivalent),
internal terminating resistance: 120
Ω
Mechani
cal
Charac-
teristics
Approximate Mass 150 g
Vibration Resistance
98 m/s
2
max. (10 Hz to 2,500 Hz) in three directions
Shock Resistance
980 m/s
2
, (11 ms) two times in three directions
Environ-
ment
Operating Temperature
Range
0°C to 55°C
Storage Temperature
Range
-20°C to 80°C
Humidity Range 20% to 90% relative humidity (with no condensation)
 Loading...
Loading...


