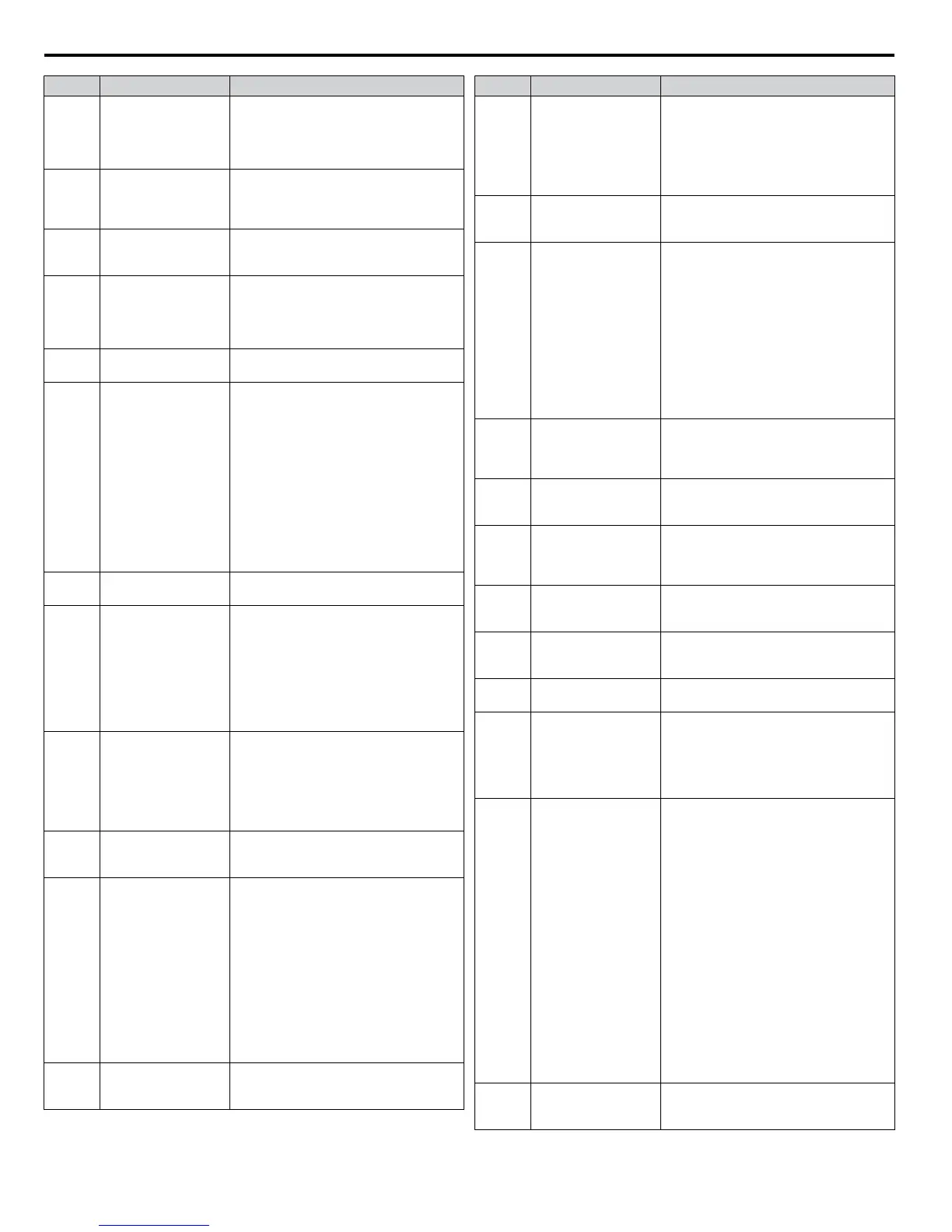
No. Name Description
H5-08
Communication
Protocol Selection
Selects the communication protocol.
0: MEMOBUS/Modbus
1: N2 (Metasys)
2: P1 (APOGEE FLN)
3: BACnet
H5-09 CE Detection Time
Sets the time required to detect a
communications error.
Adjustment may be needed when
networking several drives.
H5-10
Unit Selection for
MEMOBUS/Modbus
Register 0025H
0: 0.1 V units
1: 1 V units
H5-11
Communications
ENTER Function
Selection
0: Drive requires an Enter command
before accepting any changes to
parameter settings.
1: Parameter changes are activated
immediately without the Enter command.
H5-12
Run Command Method
Selection
0: FWD/Stop, REV/Stop
1: Run/Stop, FWD/REV
L1-01
Motor Overload
Protection Selection
0: Disabled
1: General purpose motor (standard fan
cooled)
4: PM motor with variable torque control
The drive may not be able to provide
protection when using multiple motors,
even if overload is enabled in L1-01. Set
L1-01 to 0 and install separate thermal
relays to each motor.
Note: Default setting is
determined by parameter
A1-02, Control Method
Selection.
L1-02
Motor Overload
Protection Time
Sets the motor thermal overload protection
(oL1) time.
L1-03
Motor Overheat Alarm
Operation Selection
(PTC input)
Sets operation when the motor temperature
analog input
(H3-02 or H3-10 = E) exceeds the alarm
level.
0: Ramp to stop
1: Coast to stop
2: Fast Stop (decelerate to stop using the
deceleration time in C1-09)
3: Alarm only (“oH3” will flash)
L1-04
Motor Overheat Fault
Operation Selection
(PTC input)
Sets stopping method when the motor
temperature analog input (H3-02, or H3-10
= E) exceeds the oH4 fault level.
0: Ramp to stop
1: Coast to stop
2: Fast Stop (decelerate to stop using the
deceleration time in C1-09)
L1-05
Motor Temperature
Input Filter Time (PTC
input)
Adjusts the filter for the motor temperature
analog input
(H3-02, or H3-10 = E).
L1-08 oL1 Current Level
Sets the reference current for motor thermal
overload detection for the motor in
amperes.
Note: 1. Available in drive
software versions
PRG: 1016 and later.
2. Default setting is
determined by
parameters o2-04,
Drive Model
Selection, and C6-01,
Drive Duty Selection.
L1-13
Continuous
Electrothermal
Operation Selection
0: Disabled
1: Enabled
2: Enable using Real Time Clock
No. Name Description
L2-01
Momentary Power
Loss Operation
Selection
0: Disabled.
Drive trips on Uv1 fault when power is lost.
1: Recover within the time set in L2-02.
Uv1 will be detected if power loss is longer
than L2-02.
2: Recover as long as CPU has power.
Uv1 is not detected.
L2-02
Momentary Power
Loss Ride-Thru Time
Sets the Power Loss Ride-Thru time.
Enabled only when
L2-01 = 1 or 3.
L2-03
Momentary Power
Loss Minimum
Baseblock Time
Sets the minimum wait time for residual
motor voltage decay before the drive output
reenergizes after performing Power Loss
Ride-Thru.
Increasing the time set to L2-03 may help if
overcurrent or overvoltage occur during
Speed Search or during DC Injection
Braking.
Note: Default setting is
dependent on parameter
o2-04, Drive Model
Selection.
L4-05
Frequency Reference
Loss Detection
Selection
0: Stop. Drive stops when the frequency
reference is lost.
1: Run. Drive runs at a reduced speed
when the frequency reference is lost.
L4-06
Frequency Reference
at Reference Loss
Sets the percentage of the frequency
reference that the drive should run with
when the frequency reference is lost.
L5-01
Number of Auto
Restart Attempts
Sets the number of times the drive may
attempt to restart after the following faults
occur: GF, LF, oC, ov, PF, oL1, oL2, oL3,
STo, Uv1.
L5-02
Auto Restart Fault
Output Operation
Selection
0: Fault output not active.
1: Fault output active during restart attempt.
L5-03
Time to Continue
Making Fault Restarts
Enabled only when L5-05 is set to 0. Causes
a fault if a fault restart cannot occur after the
set time passes.
L5-04
Fault Reset Interval
Time
Sets the amount of time to wait between
performing fault restarts.
L5-05
Fault Reset Operation
Selection
0: Continuously attempt to restart while
incrementing restart counter only at a
successful restart.
1: Attempt to restart with the interval
time set in L5-04 and increment the
restart counter with each attempt.
L6-01
Torque Detection
Selection 1
0: Disabled
1: oL3 detection only active during speed
agree, operation continues after detection
2: oL3 detection always active during run,
operation continues after detection
3: oL3 detection only active during speed
agree, output shuts down on an oL3 fault
4: oL3 detection always active during run,
output shuts down on an oL3 fault
5: UL3 detection only active during speed
agree, operation continues after detection
6: UL3 detection always active during run,
operation continues after detection
7: UL3 detection only active during speed
agree, output shuts down on an oL3 fault
8: UL3 detection always active during run,
output shuts down on an oL3 fault
9: UL6 at speed agree (alarm)
10: UL6 at run (alarm)
11: UL6 at speed agree (fault)
12: UL6 at run (fault)
L6-02
Torque Detection
Level 1
Sets the overtorque and undertorque
detection level.
i.8 Parameter Table
74
YASKAWA ELECTRIC TOEP C710616 54A YASKAWA AC Drive - Z1000 Quick Start Guide

 Loading...
Loading...














