34 Rockwell Automation Publication 842E-UM001C-EN-P - September 2016
Chapter 3 EtherNet/IP Overview
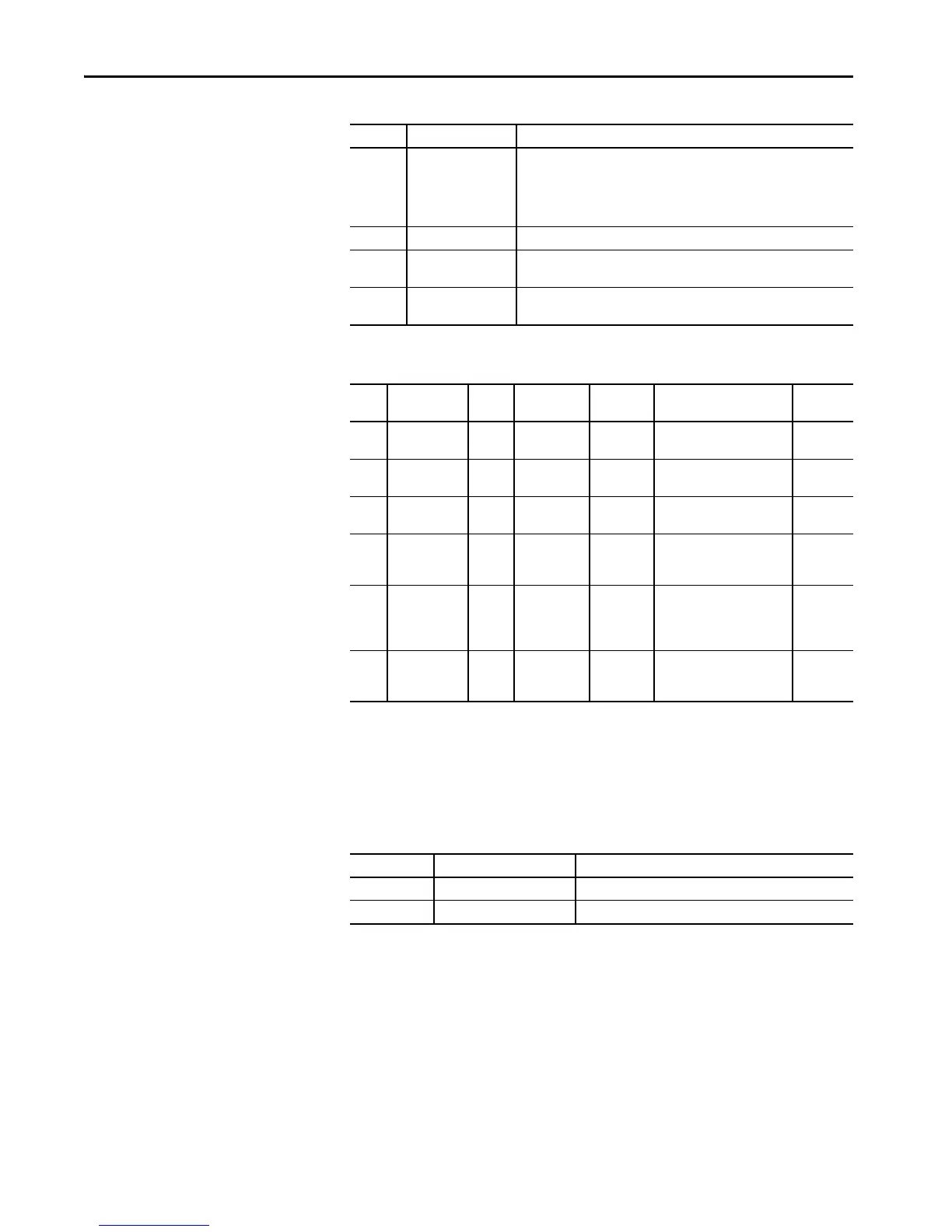
Position Sensor Object
(1) Nonvolatile
Instance Services of the position sensor object are automatically populated in
the explicit message instruction configuration
Instance Service Name Description
0x05 Reset Restart with all EEPROM parameters of the encoder, restart with the factory
defaults
00: Restart Object– read all EEPROM parameters
01: set and save factory defaults and restart object– read all EEPROM
parameter
0x0E Get_Attribute_Single Returns value of attribute
0x15
(21dec)
Restore Restore all parameter values from the non-volatile storage, customer
defaults
0x16
(22dec)
Save Save parameters to the non-volatile storage
Table 14 - Class Services of the Position Sensor Object
Num
(dec)
Required/
Optional
Access
Rule
Name Data type Description Default
1Required
(implemented)
Get Revision INT Object revision no 0x00 02
2 Implemented Get Max instance INT Max. instance number of an
object in this class
0x00 01
3 Implemented Get Number of
instances
INT Number of object instances in
this class
0x00 01
6 Implemented Get Maximum ID
number class
attributes
INT Highest implemented class ID 0x00 64
7 Implemented Get Maximum ID
number
instance
attributes
INT Highest implemented
instance attribute ID
0x00 7A
100 Get NV
(1)
Encoder
firmware
version
ARRAY
of bytes
aa.bb: major revision
minor revision
dd.mm.yy: day.month.year
842eaa.bb
dd.mm.yy
Table 15 - Class Attributes of the Position Sensor Object
Instance Service name Description
0x0E Get_Attribute_Single Returns value of attribute
0x10 Set_Attribute_Single Sets value of attribute
Table 16 - Instance Services of the Position Sensor Object

 Loading...
Loading...