Position Indexer/Speed Profiler 63
Position Regulated Step Parameters
Each of the Position Regulated steps has the following associated parameters or
functions:
X = Function not applicable to this step type
Homing Routine
Each time the profile/indexer is enabled, the drive requires a home position to be
detected. The following options are available:
Homing to Marker Pulse with Encoder Feedback
- When “Find Home” is
commanded, the homing routine is run when a start command is issued. The
Homing bit (11) in [Profile Status], parameter 700 will be set while the homing
routine is running. The drive will ramp to the speed and direction set in [Find Home
Speed], parameter 713 at the rate set in [Find Home Ramp], parameter 714 until the
digital input defined as Home Limit is activated. The drive will then ramp to zero
and then back up to first marker pulse prior to the Home Limit switch at 1/10th the
[Find Home Speed]. When on the marker pulse, the At Home bit (13) is set in the
[Profile Status] and the drive is stopped.
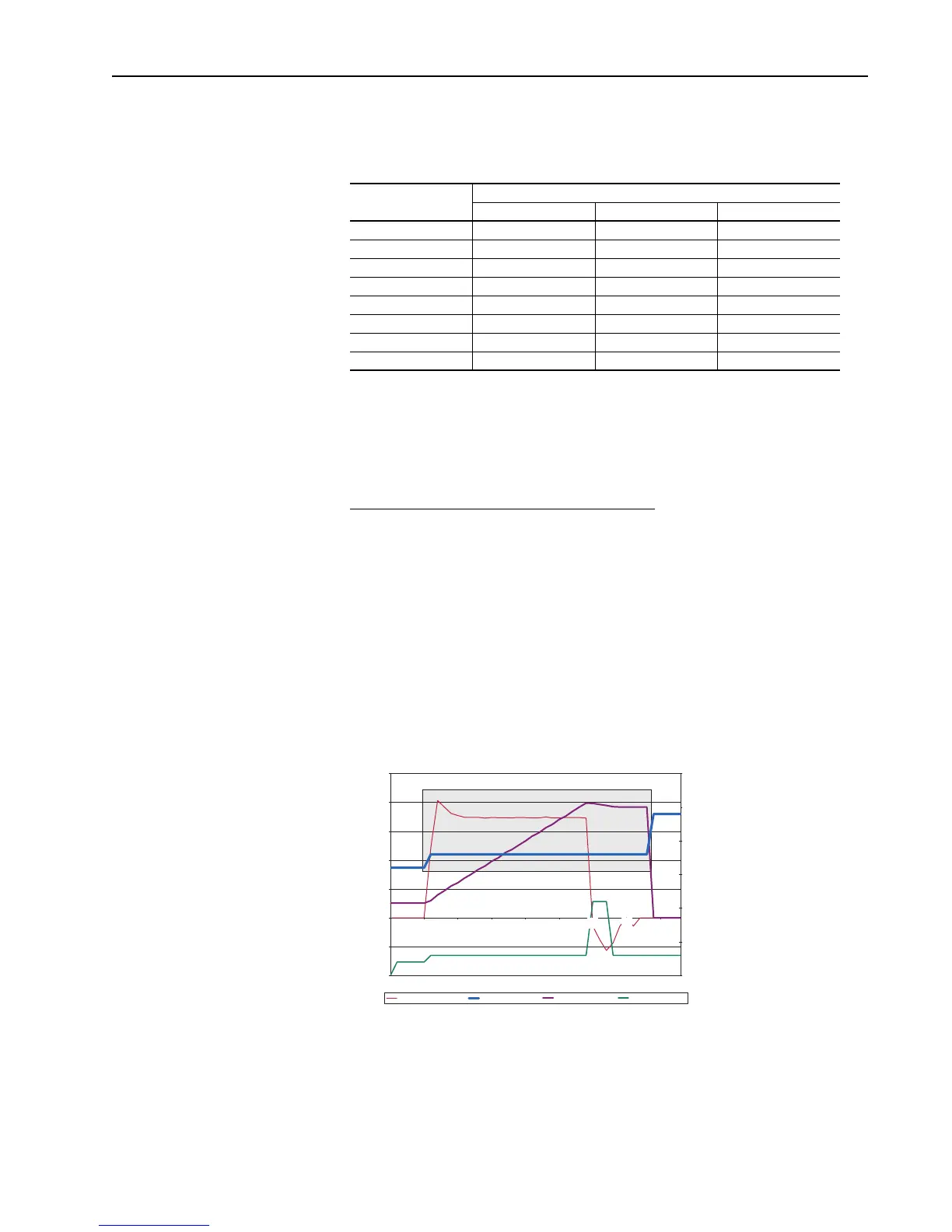
The diagram below shows the sequence of operation for homing to a marker pulse.
[Encoder Z Chan], parameter 423 must be set to “Marker Input” or “Marker Check”
for this type of homing.
Homing to Marker
Step Type
Encoder Absolute Encoder Incremental End Hold Position
Value Position & Direction Position & Direction X
Velocity Speed Speed X
Accel Time Accel Rate Accel Rate X
Decel Time Decel Rate Decel Rate X
Next Step Condition At Position = 1 At Position =1 At Position =1
Dwell Dwell Time Dwell Time Dwell Time
Batch X Batch Number X
Next Next Step Next Step X (Stop)
-100
-50
0
50
100
150
200
250
2 7 12 17 22 27 42
0
5
10
15
20
25
30
[Encoder Speed], 415 [Units Traveled], 701 [Dig In Status], 216[Profile Status], 700
Find Home Command
Start Command
Home Limit Input
At Home
Homing
3732
Encoder Speed
Profile Status
Units Traveled
Digital In Status

 Loading...
Loading...