2-144 Process PI Loop
to operate during the decel ramp until the PI output becomes more
than the master reference. When set to “0,” the drive will disable PI
and perform a normal stop. This bit is active in Trim mode only.
• Anti-Wind Up (PowerFlex 700 Only). When Anti-Windup is set to
“1” the PI loop will automatically prevent the integrator from creating
an excessive error that could cause loop instability. The integrator will
be automatically controlled without the need for PI Reset or PI Hold
inputs.
• Torque Trim. When Torque Trim is set to “1” the output
of the process PI loop will be added to Torque Reference A and B,
instead of being added to the speed reference.
2. [PI Control] is a set of bits to dynamically enable and disable the
operation of the process PI controller. When this parameter is
interactively written to from a network it must be done through a data
link so the values are not written to EEprom.
• PI Enable - The PI loop can be enabled/disabled. The Enabled status
of the PI loop determines when the PI regulator output is part or all of
the commanded speed. The logic evaluated for the PI Enabled status
is shown in the following ladder diagram.
The drive must be in run before the PI Enabled status can turn on. The
PI will remain disabled when the drive is jogged. The PI is disabled
when the drive begins a ramp to stop, except in the PowerFlex 700
when it is in Trim mode and the Stop mode bit in [PI Configuration]
is on.
When a digital input is configured as “PI Enable,” the PI Enable bit of
[PI Control] must be turned on for the PI loop to become enabled.
If a digital input is not configured as “PI Enable” and the PI Enable
bit in [PI Control] is turned on, then the PI loop may become enabled.
If the PI Enable bit of [PI Control] is left continuously, then the PI
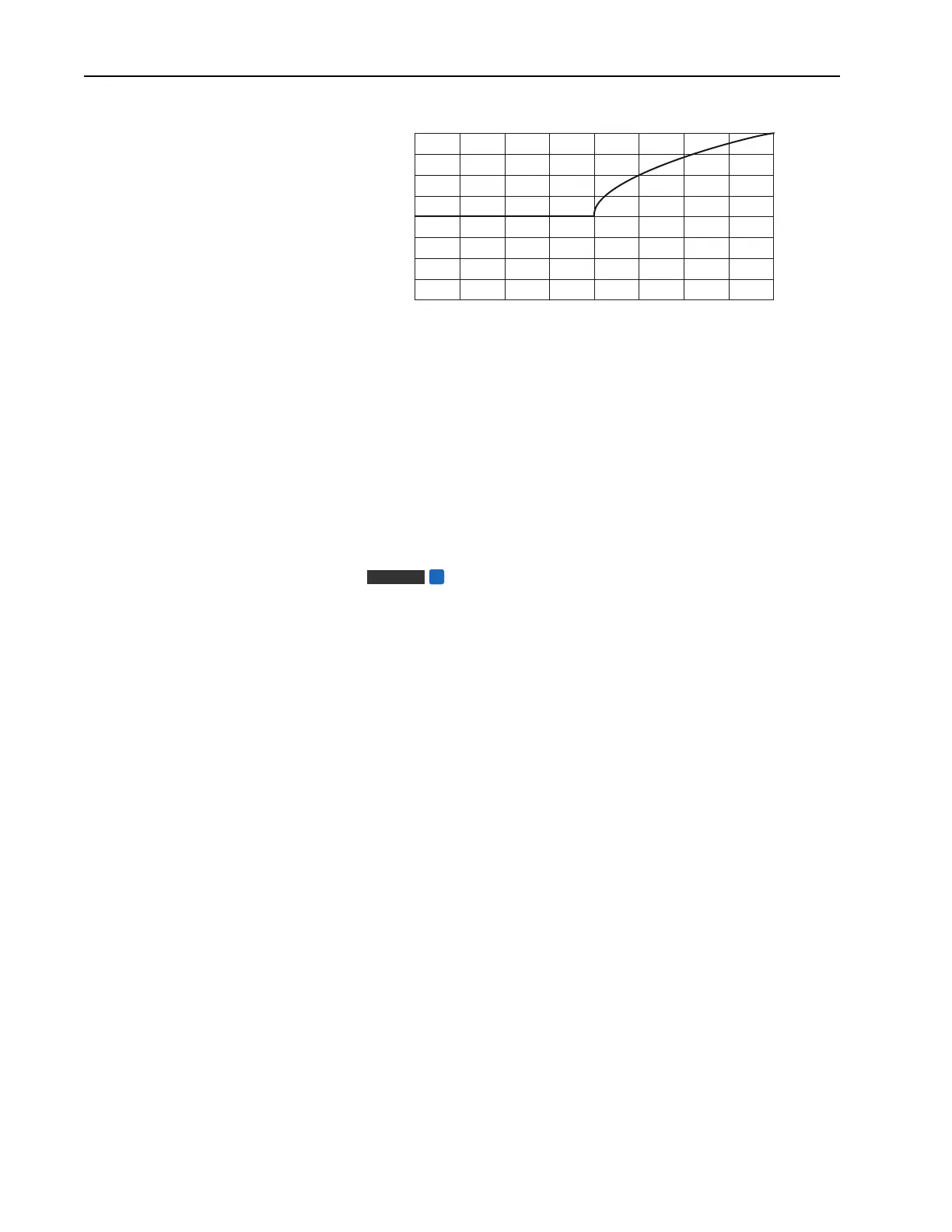
-100.0 -75.0 -50.0 -25.0 0.0 25.0 50.0 75.0 100.0
Normalized Feedback
Normalized SQRT(Feedback)
-100.0
-75.0
-50.0
-25.0
0.0
25.0
50.0
75.0
100.0
Vector
FV
 Loading...
Loading...









