AMU Use
26
3.4.6. Running RESUME and UPDATE
3.4.6.1. Canceling running
All the operating modes LEARN, IMPROVE, MONITOR and UPDATE can be stopped and
started at any time without significant effect on monitoring performance, by pressing the
CLEAR button (and providing the correct password). Subsequent restart of AMU can be
achieved by selecting RESUME from the main menu, which will cause AMU to continue in its
incomplete mode at the point of interruption. Thus, if it is necessary to stop AMU for any
reason, it can be restarted without affecting any existing data.
3.4.7. Advanced use
It is possible to customize the behavior of AMU by adjusting various settings. As usual a
valid password must be supplied before the Edit Settings menu can be entered.
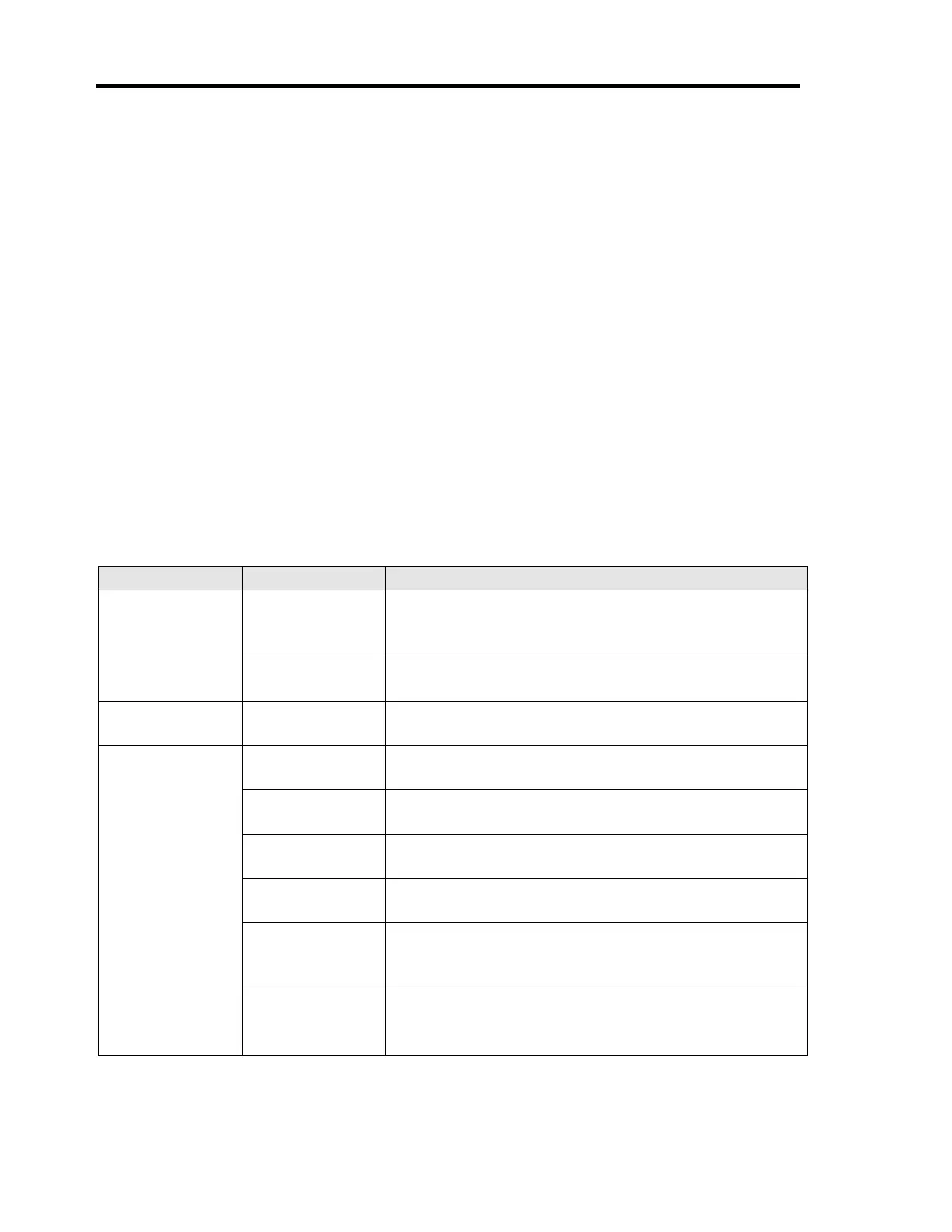
The following table summarizes the settings that can be changed together with their
significance. It is recommended that the original values of each setting be recorded prior to
changing them. After changing certain settings it may be necessary to relearn the motor.
Switch on/off calculation of harmonic values. Note that
the calculation of harmonic values can significantly
lengthen the cycle time.
The channel number (1-6) of the channel to be used for
harmonic calculations.
The calibration constants for the sensors on each
channel.
Maximum permitted voltage imbalance
Maximum permitted current imbalance
Maximum voltage range (as ± percentage range around
nominal)
Maximum permitted current upper limit (as percentage
above nominal)
Minimum acceptable level below which voltage is
considered to be zero for line and power fault alarms
(as percentage of nominal)
Minimum acceptable level, below which current is
considered to be zero for motor not running alarm (as
percentage of nominal)