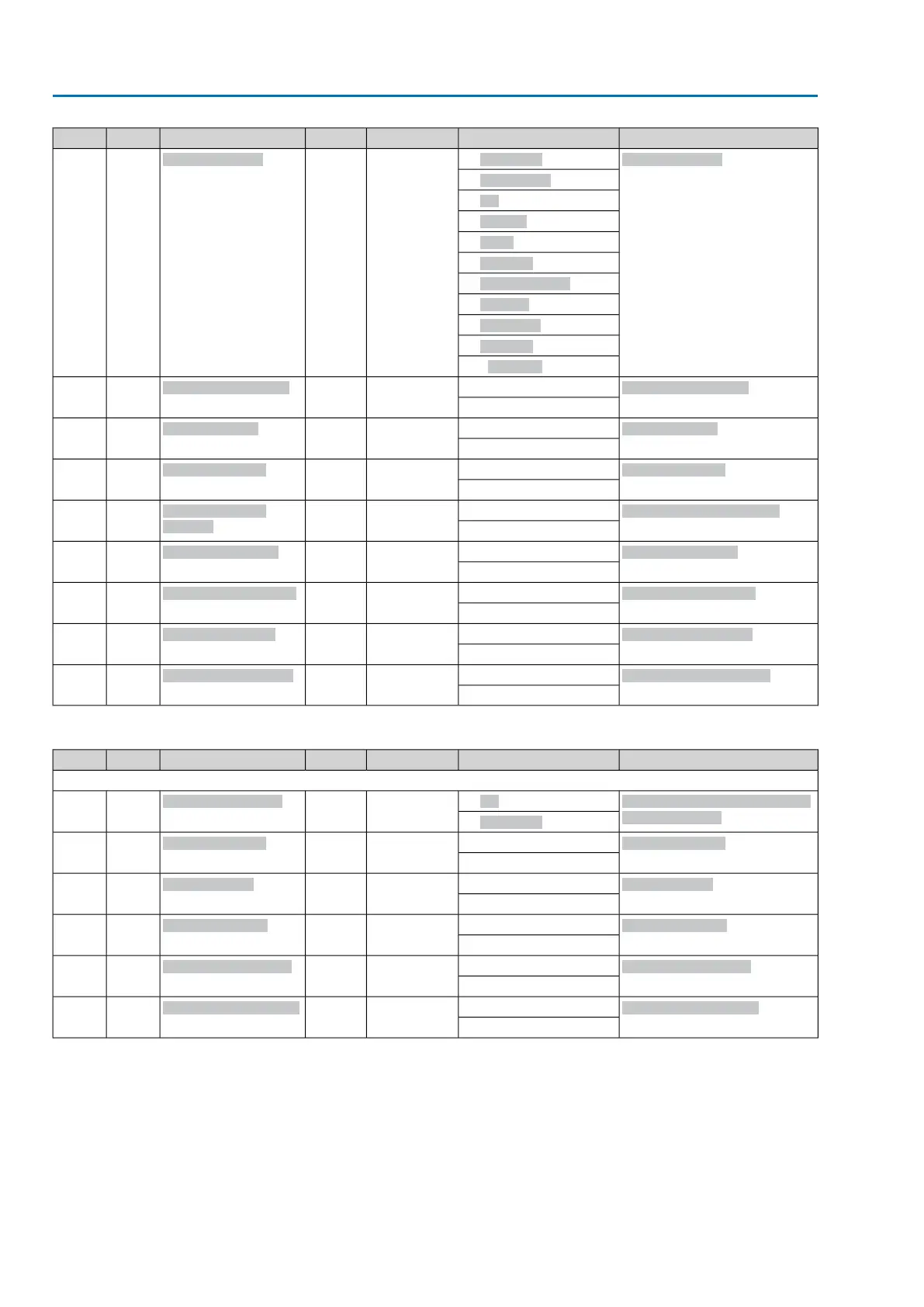
ExplanationSetting valueDefaultAccessParametersTypeNo.
Operation mode0 : Power Off
R
Operation mode
enum44-6
1 : EMCY stop
2 : Off
3 : Service
4 : Local
5 : Interlock
6 : EMERGENCY
7 : Remote
8 : Remote II
9 : Fieldbus
10 : Disabled
Operation command
Min = 0R
Operation command
DrvCmd444-7
Max = 0xFFFFFFFF
Running OPEN
Min = 0R
Running OPEN
BOOL44-8
Max = 1
Running CLOSE
Min = 0R
Running CLOSE
BOOL44-9
Max = 1
Setpoint position reached
Min = 0R
Setpoint position
reached
BOOL44-10
Max = 1
Limit switch OPEN
Min = 0R
Limit switch OPEN
BOOL44-11
Max = 1
Limit switch CLOSED
Min = 0R
Limit switch CLOSED
BOOL44-12
Max = 1
Torque switch OPEN
Min = 0R
Torque sw. OPEN
BOOL44-13
Max = 1
Torque switch CLOSED
Min = 0R
Torque sw. CLOSED
BOOL44-14
Max = 1
Table 78: Positioner
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 18 bytes
Setting the adaptive behaviour
of the positioner
0 : Off
0R/W
Adaptive behaviour
enum52-1
1 : Adaptive I
Setpoint position
Min = 0 [0.1 %]R
Setpoint position
U1652-2
Max = 1000 [0.1 %]
Actual position
Min = 0 [0.1 %]R/W
Actual position
U1652-3
Max = 1000 [0.1 %]
Outer dead band
Min = 0 [0.1 %]R
Outer dead band
U3252-4
Max = 1000 [0.1 %]
Outer dead b. OPEN
Min = 0 [0,1 %]R
Outer dead b. OPEN
U3252-5
Max = 1000 [0,1 %]
Outer dead b. CLOSE
Min = 0 [0,1 %]R
Outer dead b. CLOSE
U3252-6
Max = 1000 [0,1 %]
78
Actuator controls
Appendix AC 01.2/ACExC 01.2 Profibus DP