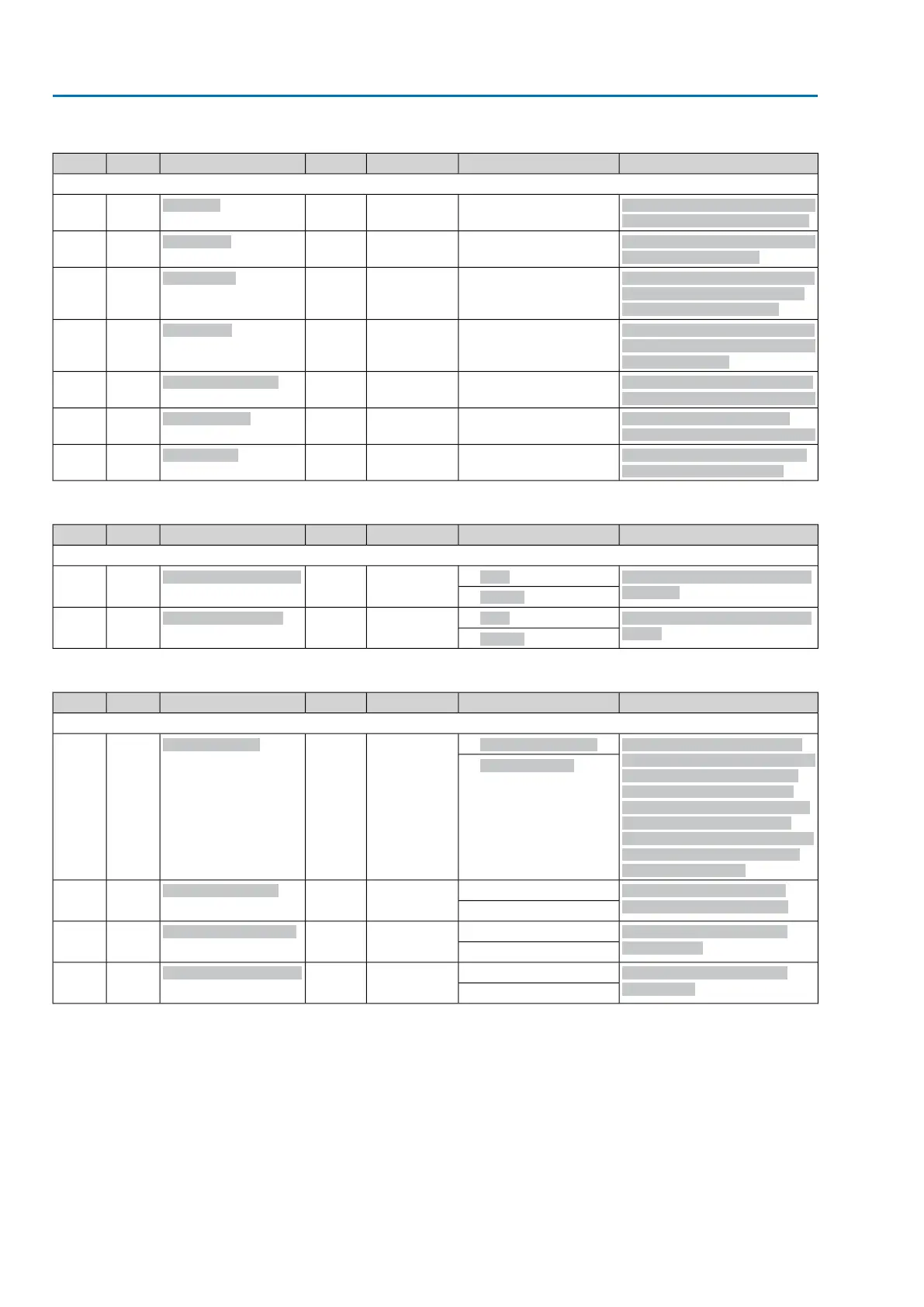
Table 49: Hardware article no.
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 140 bytes
Article number of 'Local controls'
electronics sub-assembly (A9)
_ ARTNR
OSS _
R
ArtNo LC
S207-1
Article number of 'Logic' electron-
ics sub-assembly (A2)
_ ARTNR LO-
GIK _
R
ArtNo logic
S207-2
Article number of 'MCM' (Motor
Control and Monitoring / A52)
electronics sub-assembly
_ ARTNR RE-
LAIS _
R
ArtNo MCM
S207-3
Article number of 'PSO' (Power
Supply Options / A52.1) electron-
ics sub-assembly
_ ART-
NR_OPT _
R
ArtNo PSO
S207-4
Article number of 'I/O interface'
electronics sub-assembly (A1.0)
_ ARTNR IN-
TF _
R
ArtNo I/O interface
S207-5
Article number of 'Fieldbus'
electronics sub-assembly (A1.8)
_ ARTNR
PBD _
R
ArtNo fieldbus
S207-6
Article number of 'MWG' elec-
tronics sub-assembly (B6)
_ ARTNR
MWG _
R
ArtNo MWG
S207-7
Table 50: Type of seating
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 4 bytes
Type of seating in end position
CLOSED
0 : Limit
0R/W
End position CLOSED
enum9-1
1 : Torque
Type of seating in end position
OPEN
0 : Limit
0R/W
End position OPEN
enum9-2
1 : Torque
Table 51: Torque switching
ExplanationSetting valueDefaultAccessParametersTypeNo.
Data length = 12 bytes
Enabling/disabling torque by-
pass. Torque by-pass' = function
active means that the torque
monitoring is suspended for
each start and this for the time
as defined in the field 'Time
torque by-pass'. Consequently,
unseating is possible without
torque fault tripping.
0 : Function not active
1R/W
Torque by-pass
enum10-1
1 : Function active
By-pass duration of torque
monitoring at actuator start
Min = 0 [0.1 s]0R/W
Torque by-pass [s]
U1610-2
Max = 50 [0.1 s]
Tripping torque in direction
CLOSE [Nm]
Min = 0 [Nm]20R/W
Trip torque CLO [Nm]
U1610-3
Max = 65535 [Nm]
Tripping torque in direction
OPEN [Nm]
Min = 0 [Nm]20R/W
Trip torque OPEN [Nm]
U1610-4
Max = 65535 [Nm]
64
Actuator controls
Appendix AC 01.2/ACExC 01.2 Profibus DP
 Loading...
Loading...









