Typical transmission time for an operation command to an actuator:
Table 11: Transmission time
Transmission time for an actuator [ms]Baud rate [kbit/s]
15115.2
2057.6
2538.4
3519.2
559.6
The communication parameters to the actuators are set in the factory as follows:
Baud rate: 115.2 kbit/s
Format: 8 data bits, even parity with 1 stop bit
5.6. Interface to the distributed control system
Connection between the DCS and SIMA² can be made either via a Modbus RTU
line, Modbus TCP/IP or a combination of both protocols.These connections can also
be provided in redundant topology. In this case, the host can exchange data
independently via both cables (by using channels A or B).
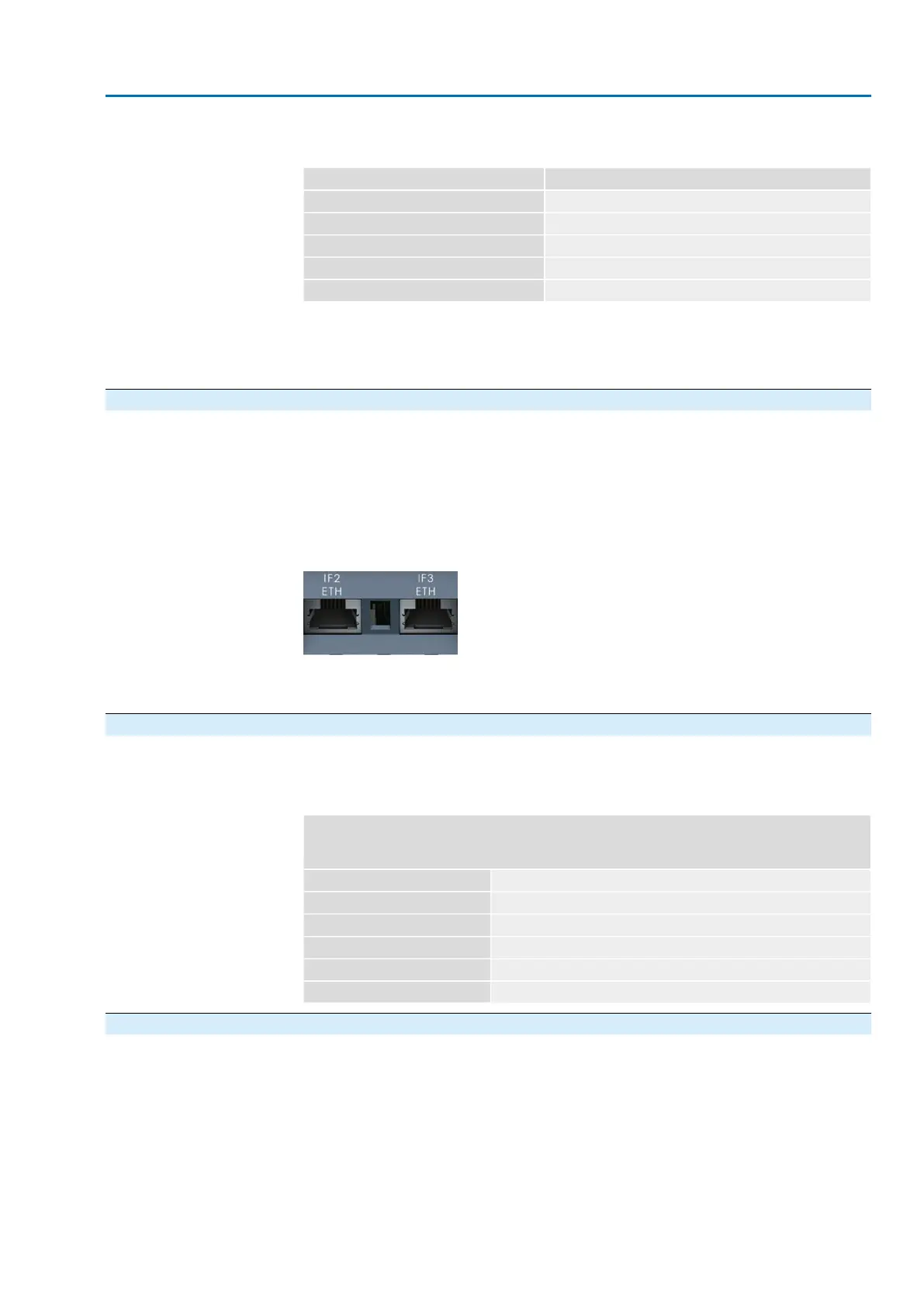
For redundant connection to the DCS, SIMA² is equipped with respectively two RJ45
slots or EIA-485 interface boards.
Figure 17: RJ45 connections of SIMA²
Information
Check configuration! The DCS settings must be performed according to the available
SIMA² configuration.
5.7. Fieldbus cable specifications
Fieldbus cables characteristics must be as follows. Stranded in pairs and shielded
copper cables must be used.
Table 12:
Cable recommendation
Only cables complying with the recommendations of EIA-485 specifications should be used for Modbus
wiring.
135 to 165 Ohm, at a measurement frequency between 3 and 20 MHzImpedance
< 30 pF per metreCable capacity
> 0.64 mmWire diameter
> 0.34 mm², corresponds to AWG 22Cross section
< 110 Ohm per kmLoop resistance
CU shielding braid or shielding braid and shielding foilScreening
5.8. Redundancy change-over
If an active SIMA² in hot standby version fails, the passive SIMA² automatically takes
over communication.The active SIMA² answers all requests of the DCS and controls
fieldbus communication to the actuators.The passive SIMA² receives simultaneously
all DCS requests without responding.The passive SIMA² monitors the active SIMA²
by means of a redundancy link (synchronisation cable). If the active SIMA² fails, the
passive SIMA² completely takes over all functions and changes into active mode
without change-over delay.
19
SIMA² Master Station
MODBUS RTU, MODBUS TCP/IP to DCS Electrical connection and fieldbus connection