RoboClaw Series
Brushed DC Motor Controllers
RoboClaw Series User Manual
61
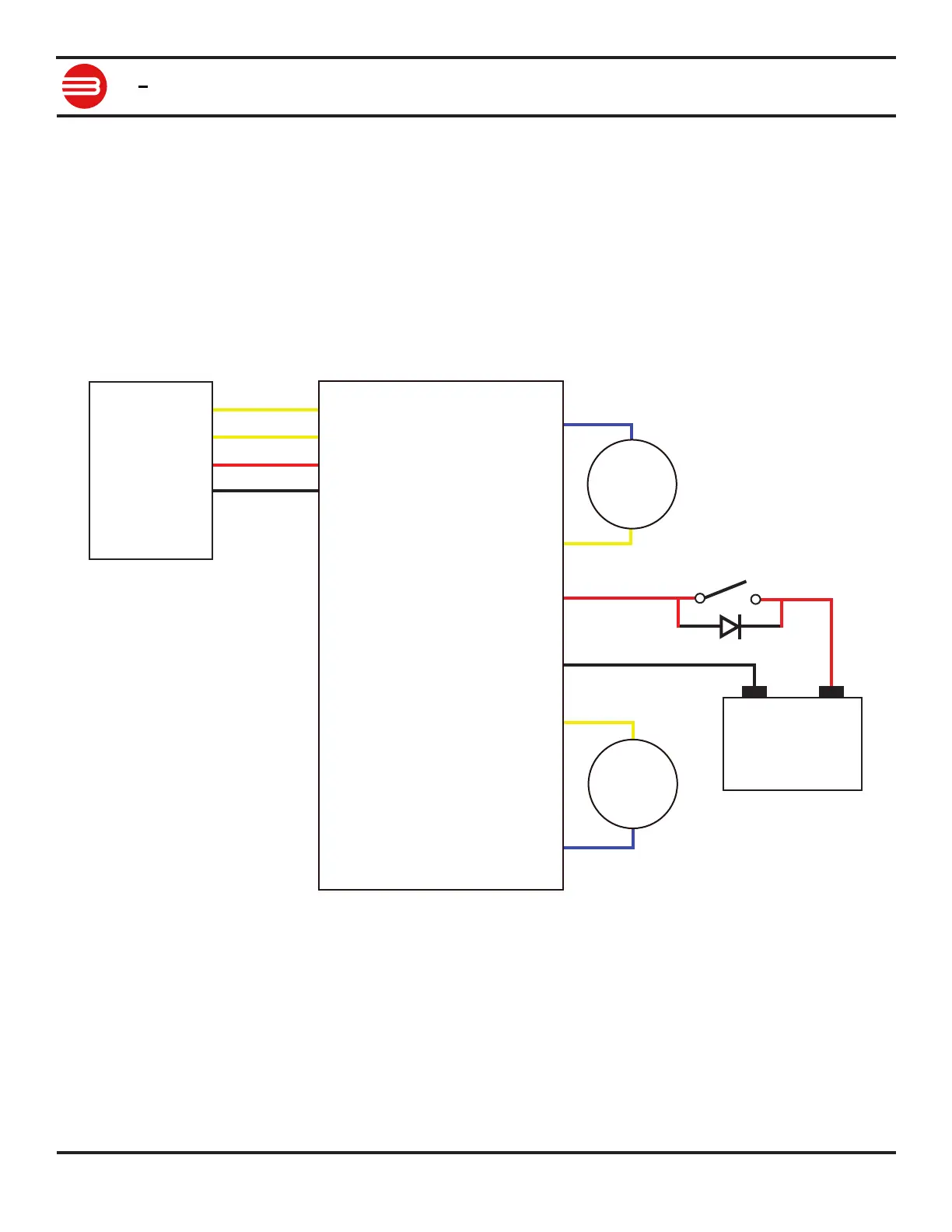
Packet Serial Wiring
In packet serial mode the RoboClaw can transmit and receive serial data. A microcontroller with
a UART is recommended. The UART will buer the data received from RoboClaw. When a request
for data is made to RoboClaw the return data will have at least a 1ms delay after the command
is received if the baud rate is set at or below 38400. This will allow slower processors and
processors without UARTs to communicate with RoboClaw.
The diagram below shows the main battery as the only power source. The 5VDC shown
connected is only required if your MCU needs a power source. This is the BEC feature of
RoboClaw. If the MCU has its own power source do not connect the 5VDC.
For model specic pinout information please refer to the data sheet for the model being used.
M1A
M1B
M2B
M2A
Negative -
Positive +
+
-
Battery
S1 Signal
S2 Signal
5VDC
UART TX
UART RX
GROUND
5VDC
GROUND
MCU
RoboClaw
Motor 1
Motor 2
D1
SW1