RoboClaw Series
Brushed DC Motor Controllers
RoboClaw Series User Manual
63
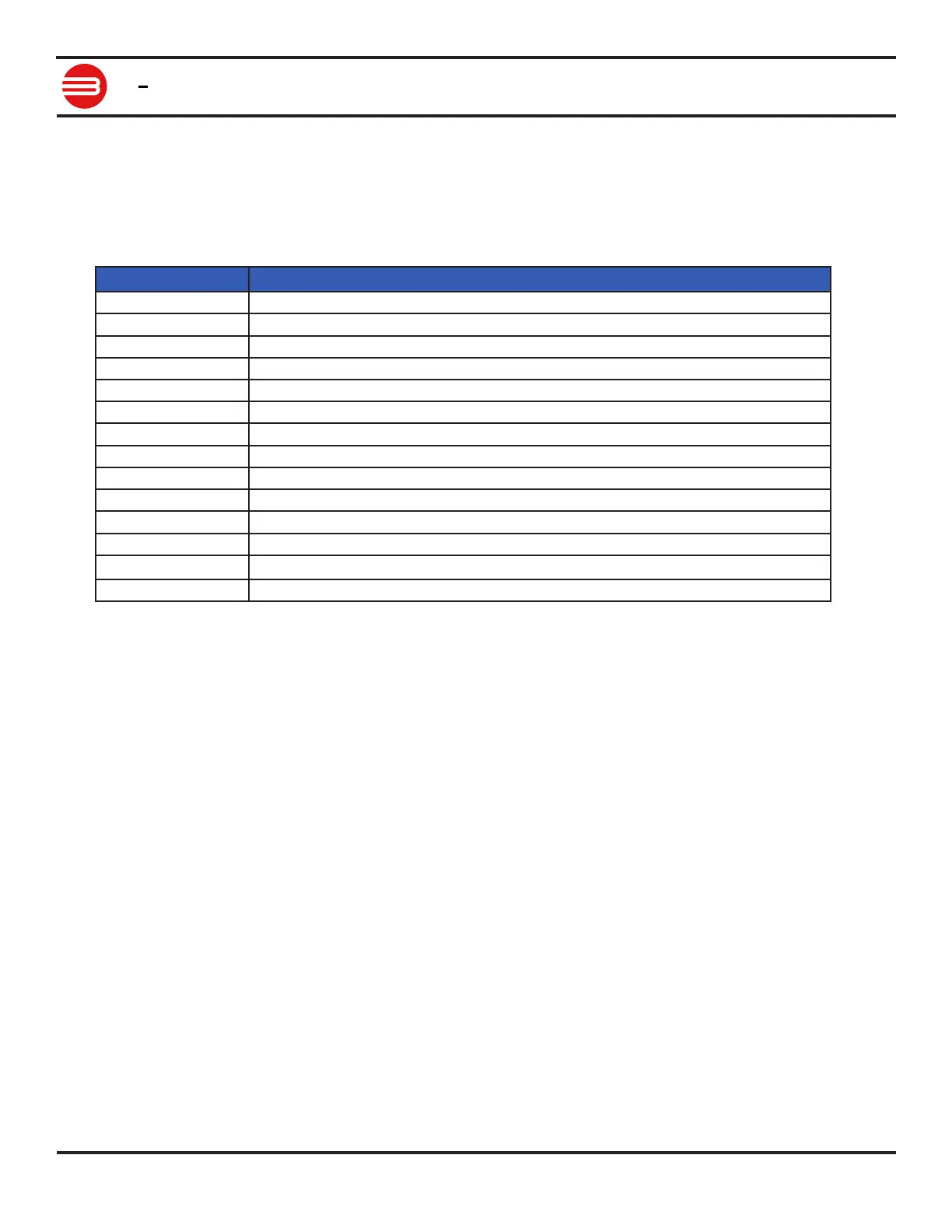
Commands 0 - 7 Compatibility Commands
The following commands are used in packet serial mode. The command syntax is the same for
commands 0 thru 7:
Send: Address, Command, ByteValue, CRC16
Receive: [0xFF]
Command Description
0 Drive Forward Motor 1
1 Drive Backwards Motor 1
2 Set Main Voltage Minimum
3 Set Main Voltage Maximum
4 Drive Forward Motor 2
5 Drive Backwards Motor 2
6 Drive Motor 1 (7 Bit)
7 Drive Motor 2 (7 Bit)
8 Drive Forward Mixed Mode
9 Drive Backwards Mixed Mode
10 Turn Right Mixed Mode
11 Turn Left Mixed Mode
12 Drive Forward or Backward (7 bit)
13 Turn Left or Right (7 Bit)
0 - Drive Forward M1
Drive motor 1 forward. Valid data range is 0 - 127. A value of 127 = full speed forward, 64 =
about half speed forward and 0 = full stop.
Send: [Address, 0, Value, CRC(2 bytes)]
Receive: [0xFF]
1 - Drive Backwards M1
Drive motor 1 backwards. Valid data range is 0 - 127. A value of 127 full speed backwards, 64 =
about half speed backward and 0 = full stop.
Send: [Address, 1, Value, CRC(2 bytes)]
Receive: [0xFF]
2 - Set Minimum Main Voltage (Command 57 Preferred)
Sets main battery (B- / B+) minimum voltage level. If the battery voltages drops below the set
voltage level RoboClaw will stop driving the motors. The voltage is set in .2 volt increments. A
value of 0 sets the minimum value allowed which is 6V. The valid data range is 0 - 140 (6V -
34V). The formula for calculating the voltage is: (Desired Volts - 6) x 5 = Value. Examples of
valid values are 6V = 0, 8V = 10 and 11V = 25.
Send: [Address, 2, Value, CRC(2 bytes)]
Receive: [0xFF]