25
4.6.4 Debouncer
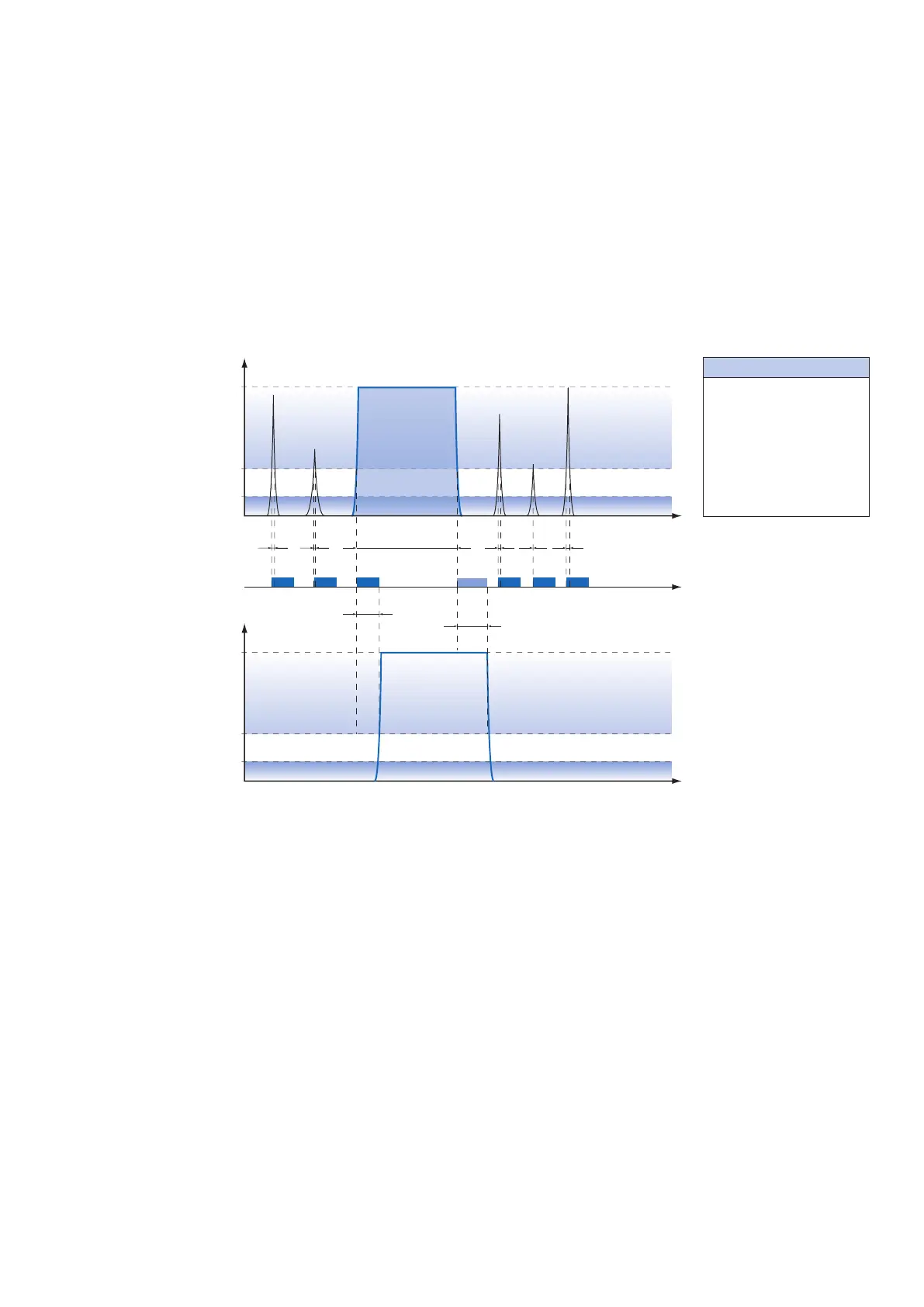
The basic idea behind this feature was to seperate interfering signals (short peaks) from
valid square wave signals, which can be important in industrial environments. Debouncing
means that invalid signals are ltered out, and signals lasting longer than a user-dened
testing time t
DebounceHigh
will be recognized, and routed to the camera to induce a trigger.
In order to detect the end of a valid signal and lter out possible jitters within the signal, a
second testing time t
DebounceLow
was introduced. This timing is also adjustable by the user.
If the signal value falls to state low and does not rise within t
DebounceLow
, this is recognized
as end of the signal.
The debouncing times t
DebounceHigh
and t
DebounceLow
are adjustable from 0 to 5 msec in steps
of 1 μsec.
This feature is disabled by default�
low
high
U
t0
4.5V
11V
30V
low
high
U
t0
4.5V
11V
30V
t
∆t
1
∆t
x
- high time of the signal
t
DebounceHigh
- user-defined debouncer delay for state high
t
DebounceLow
- user-defined debouncer delay for state low
t
DebounceHigh
∆t
2
∆t
3
∆t
4
∆t
5
∆t
6
t
DebounceLow
Incoming signals
(valid and invalid)
Debouncer
Filtered signal
4.6.5 FlashSignal
This signal is managed by exposure of the sensor.
Furthermore, the falling edge of the ash output signal can be used to trigger a movement
of the inspected objects. Due to this fact, the span time used for the sensor readout t
readout
can be used optimally in industrial environments.
4.6.6 FrameCounter
The frame counter is part of the Baumer image infoheader and supplied with every image,
if the chunkmode is activated. It is generated by hardware and can be used to verify that
every image of the camera is transmitted to the PC and received in the right order.
Debouncer:
Please note that the edges
of valid trigger signals are
shifted by t
DebounceHigh
and
t
DebounceLow
!
Depending on these
two timings, the trigger
signal might be temporally
stretched or compressed.
◄Figure33
Principle of the Baumer
debouncer.