27
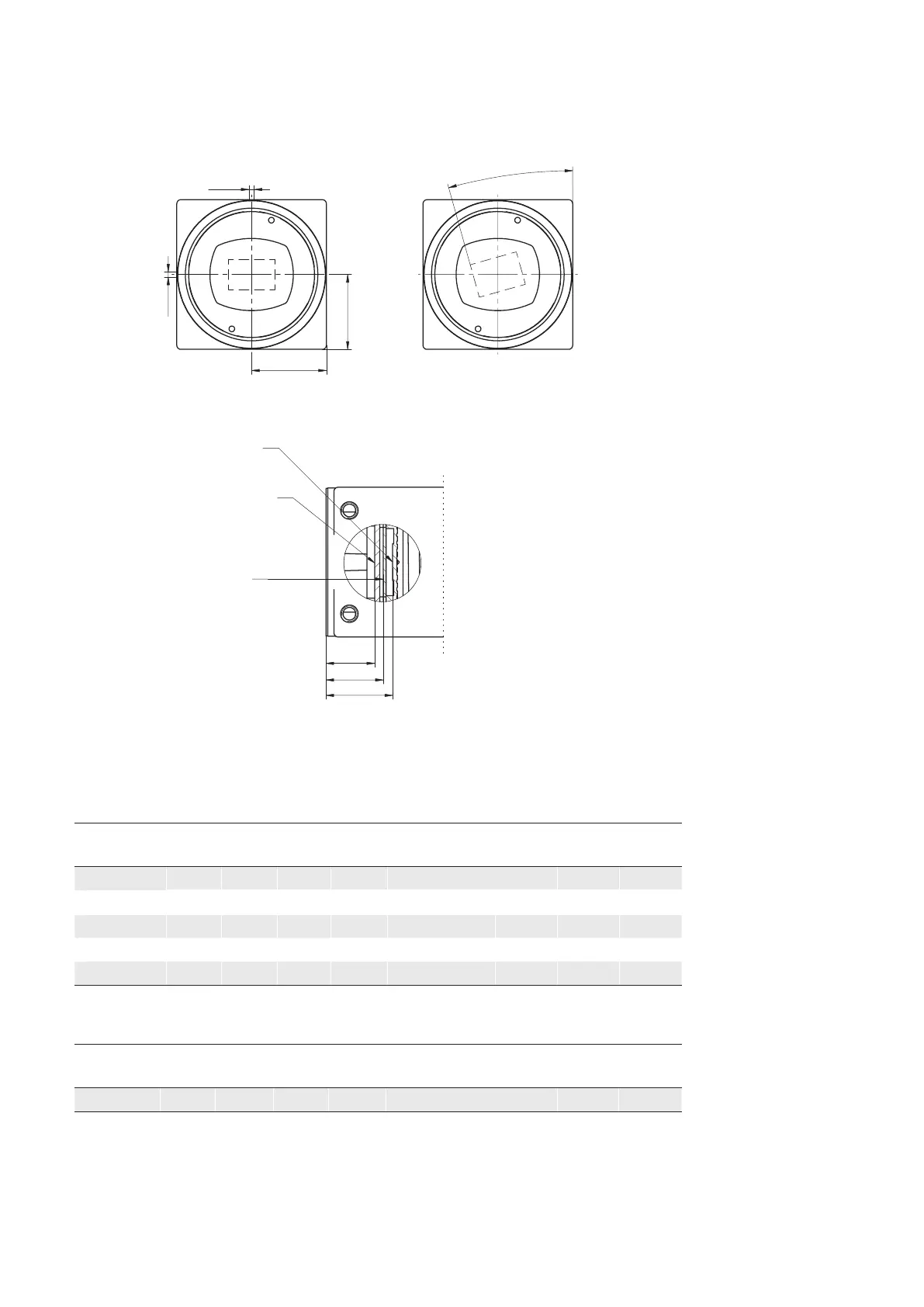
7.2 Field of View Position
The typical accuracy by assumption of the root mean square value is displayed in the
gures and the tables below:
± YM
± YR
± XR
Z
photosensitive
surface of the
sensor
front filter glass
for color cameras
thickness:
1 ± 0.1 mm
cover glass
of sensor
thickness: D
A
9,4±0,35
± XM
± α
7.2.1 VEXG
Camera
Type
± x
M
[mm]
± y
M
[mm]
± x
R
[mm]
± Y
R
[mm]
± z
typ
[mm]
± α
typ
[°]
A
[mm]
D**
[mm]
VEXG-02* 0.04 0,04 0.04 0.04 12.50 ± 0.100 0.6 11.6 0.55
VEXG-13* 0.04 0,04 0.04 0.04 12.50 ± 0.100 0.6 11.6 0.55
VEXG-25* 0.05 0.05 0.05 0.05 17.65 ± 0.070 0.6 16.5 0.55
VEXG-52* 0.06 0.06 0.06 0.06 12.5 ± 0.100 0.6 12.35 0.4
VEXG-100* 0.06 0.06 0.06 0.06 12.5 ± 0.100 0.6 12.35 0.4
7.2.2 VEXU
Camera
Type
± x
M
[mm]
± y
M
[mm]
± x
R
[mm]
± Y
R
[mm]
± z
typ
[mm]
± α
typ
[°]
A
[mm]
D**
[mm]
VEXU-24* 0.04 0,04 0.04 0.04 12.58 ± 0.065 0.4 10.8 0.50
typical accuracy by assumption of the root mean square value
* C or M
** Dimension D in this table is from manufacturer datasheet
◄Figure10
Sensor accuracy of the
Baumer VEX series