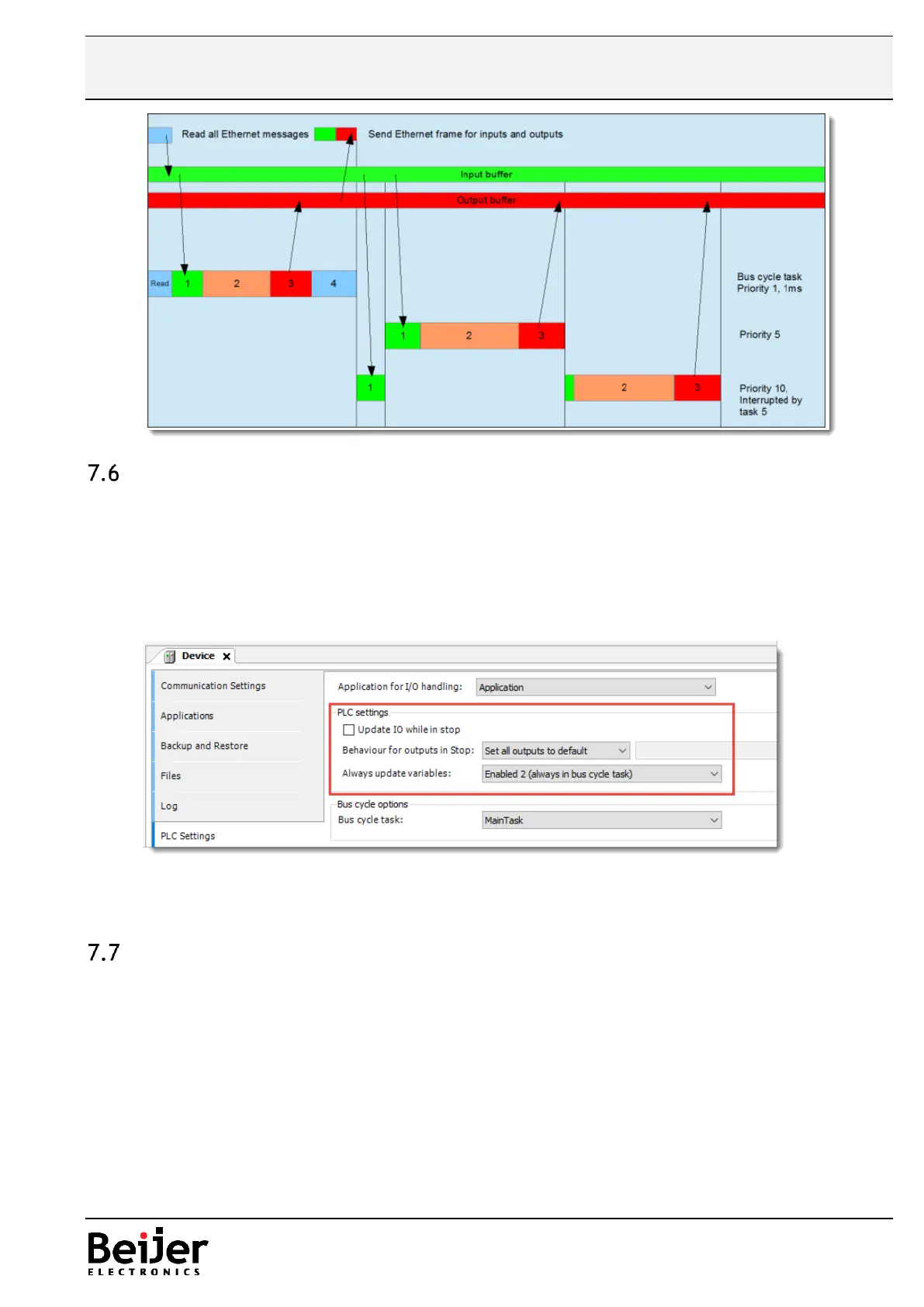
Output status in STOP mode
It is always recommended to set all outputs to FALSE in STOP mode in order to prevent a dangerous
situation. This is done by setting the Update IO while in STOP mode parameter.
The communication driver will then follow the state of the application and STOP communicating
when stopping the program execution, this will trigger a watchdog event in the slaves and will take the
action required depending of the type of application.
Performance
At each Bus task interval the pending ethernet frames from the last cycle is read. This means that
we will get an update of the I/O at every Bus task interval. By using the recommended setting of
4 ms this means that we will get a refresh of I/O by this interval. One other aspect to consider
would of course be the internal processing time for the slave device, however in most cases this
can be ignored since the internal update interval will be much faster in comparison to the
EtherCAT frames sent.