56
Configuration Mode - Complete menu (FULL)
Code Name/Description Adjustment range Factory setting
drC-
Motor control menu
(continued)
UFr
•
IR compensation (law U/F)
25 to 200% 100%
Used to optimize torque at very low speed, or to adapt to special cases (for example: for motors connected
in parallel, decrease IR compensation (law U/F)
UFr
). If there is insufficient torque at low speed, increase
IR compensation (law U/F)
UFr
. Too high a value can cause the motor not to start (locking) or a change
to current limiting mode.
SLP
•
Slip compensation
0 to 150% 100%
Visible only if Motor control type
Ctt
page 55 is not set to
PUMP
Used to adjust the slip compensation around the value set by the nominal motor slip, or to adapt to special
cases (example: for motors connected in parallel, decrease Slip compensation
SLP
).
If the set slip compensation is lower than the actual slip compensation, the motor doesn't run at nominal
speed at steady state but at a speed lower than the reference.
If the set slip compensation is greater than the actual slip compensation, motor speed is unstable.
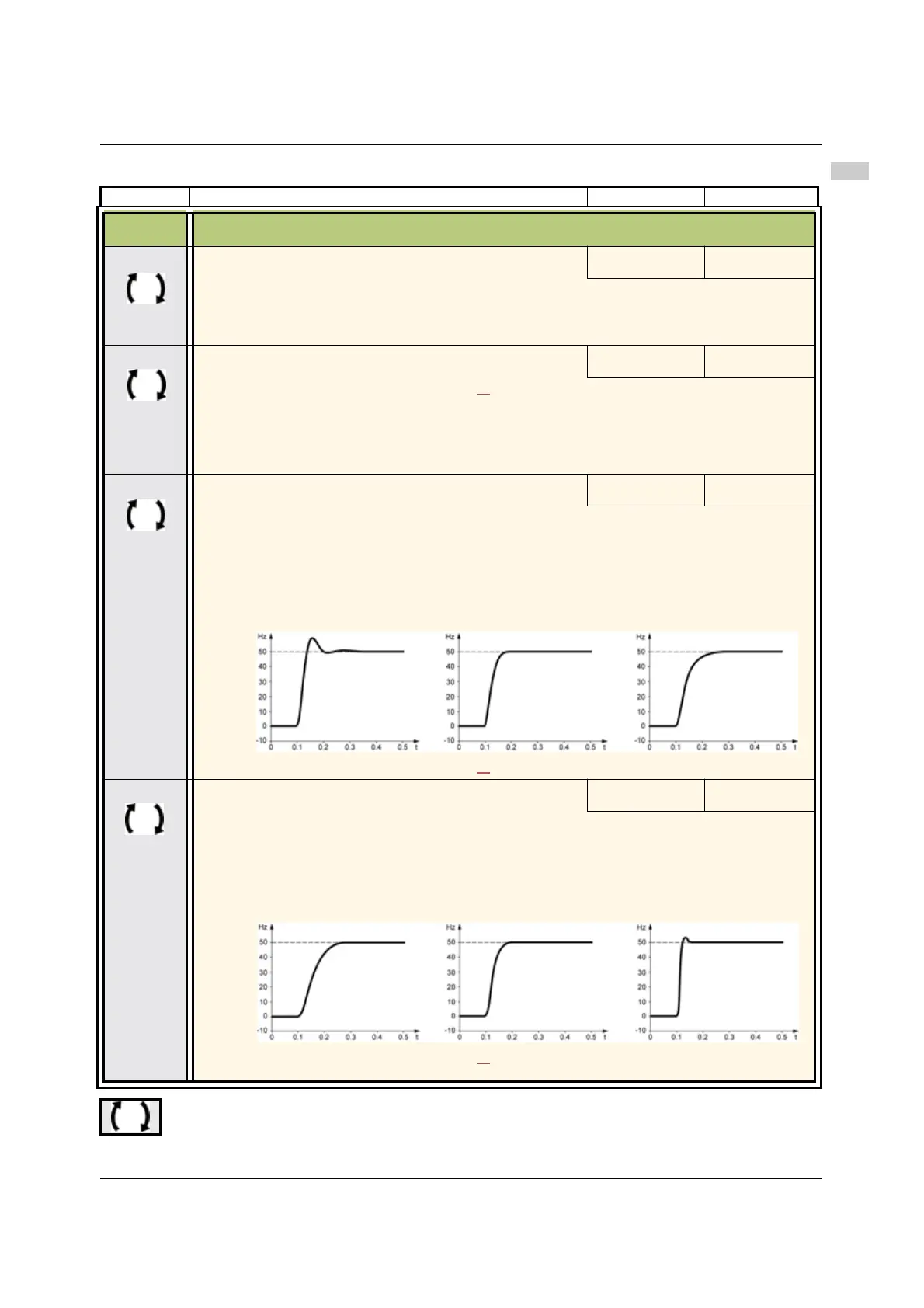
StA
•
Frequency loop stability
0 to 100% 20%
The
StA
parameter can be used to reduce overshoots and oscillations at the end of acceleration. After a
period of acceleration or deceleration,
StA
adapts the return to a steady state to the dynamics of the
machine;
Too high a value causes an extended response time.
Too low a value causes an overspeed, or even instability.
Low
StA
Correct
StA
High
StA
In this case, increase
StA
In this case, reduce
StA
Visible only if Motor control type
Ctt
page 55 is set to
PErF
.
FLG
•
Frequency loop gain
0 to 100% 20%
The
FLG
parameter adjusts the slope of the speed increase according to the inertia of the machine being
driven.
Too high a value causes an overspeed, or even instability.
Too low a value causes an extended response time
Low
FLG
Correct
FLG
High
FLG
In this case, increase
FLG
In this case, reduce
FL
G
Visible only if Motor control type
Ctt
page 55 is set to
PErF
.
Parameter that can be modified during operation or when stopped.
I-O-
drC-
CtL-
FUN-
FLt-
COM-