Page | 35
Carlson Software
WebUI (connued)
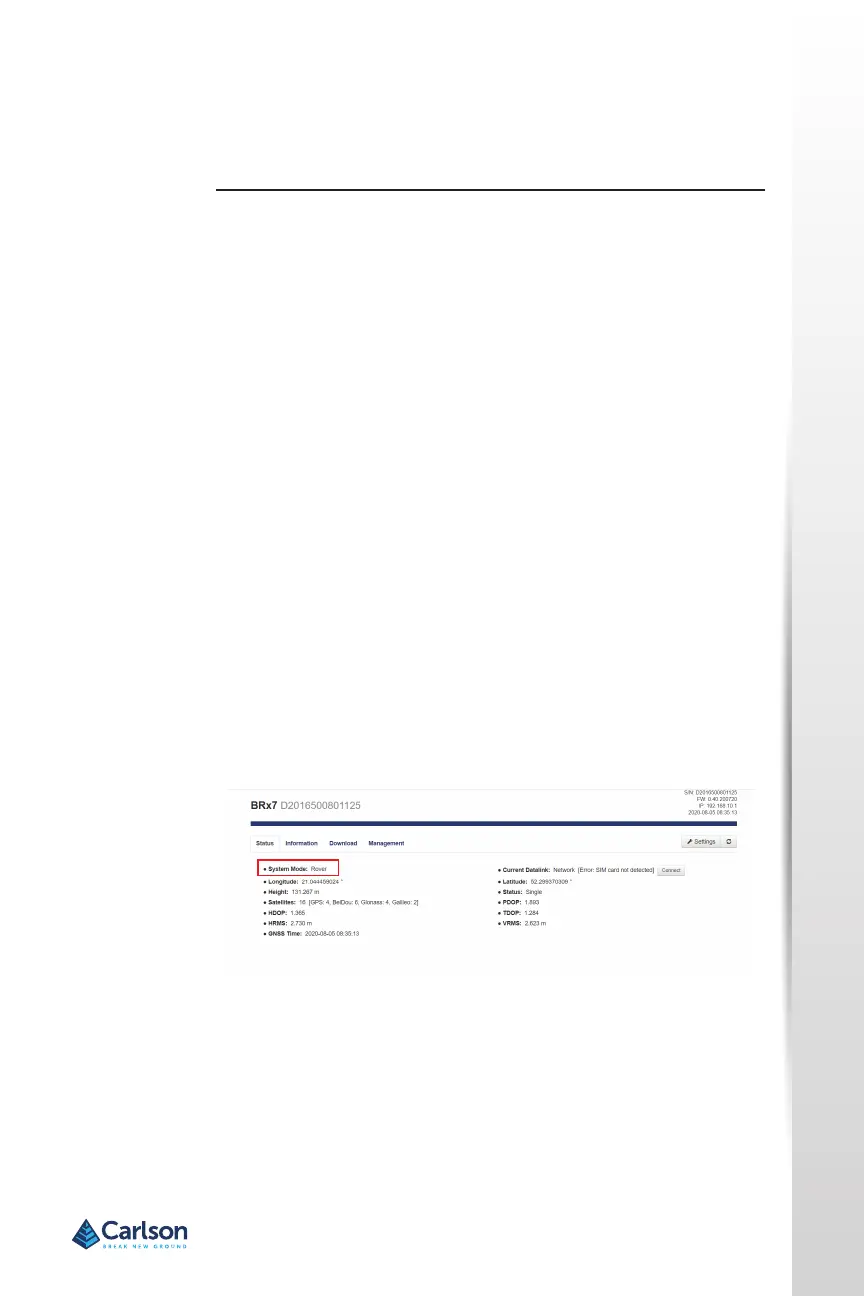
System Mode
The BRX7 can be congured as a survey rover, base staon, or run a stac
observaon.
To set the base locaon select one of the following posions:
• Single Posion: Upon startup, the BRx7 will average its posion and
use that posion for the base posion.
• Repeat Posion: Used to input a permanent base staon posion into
the BRx7. You may type in a latude, longitude, and altude, or click
Current Posion to automacally populate the eld with the current
GNSS posion.
• Baselink Posion: (Requires an Atlas H1O (10‐cenmeter)
subscripon.) Used to input a Target Accuracy. Once the accuracy of
the GNSS posion of the receiver has reached the Target Accuracy,
the receiver will begin to output RTK based on its calculated posion.
The accuracy of the GNSS posion may connue to improve. lf it does
improve, a new target accuracy may be entered, and the base posion
will shi to reect the new accuracy.
Working Mode
(connued)