102
Epsilon EP-I Indexing Drive and FM-2 Indexing Module Reference Manual
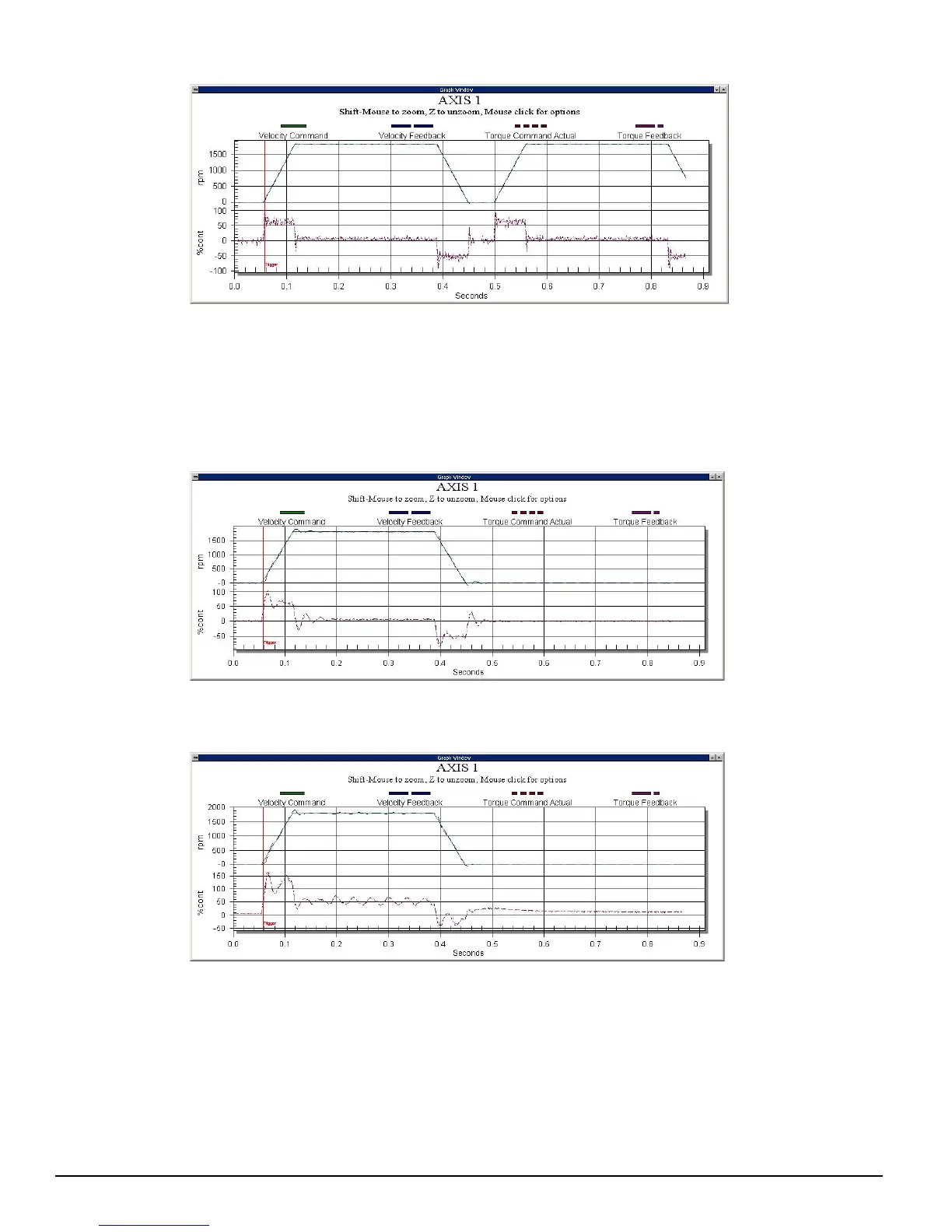
Figure 97: Inertia Setting (5) Response
3. Position Error Integral
The difference in motion when this parameter is disabled and enabled can be observed in the following graphs. The first graph
shows motion with the position error integral turned off. The second graph shows motion with the position error integral
enabled and the time constant set for 20ms. Note the settling time difference of the two indexes.
Figure 98: PEI = off
Figure 99: PEI = on
Feedforwards gain can be enabled if the performance requirements are very demanding. However, when using them make
sure the Inertia Ratio and Friction values are an accurate representation of the load. Otherwise, the system performance can
actually be degraded or stability will suffer. Enabling Feedforwards makes the system less tolerant of inertia or friction
variations during operation.