*
23 M’Ax Advanced User Guide
www.controltechniques.com Issue Number: 4
Calculating Kp, Ki, Kd for M'Ax
(Set-up method based on Compliance angle)
Compliance angle based set-up required following parameters.
Calculate the following:
I
limit
has to be stated in percent of motor rated current (as in parameter 4.07)
Then, these equations should yield correct values for the gains.
Use K
d
for no over shoot. If drive is used with position loop then use K
d
= 0 for minimum following error.
To give an example:
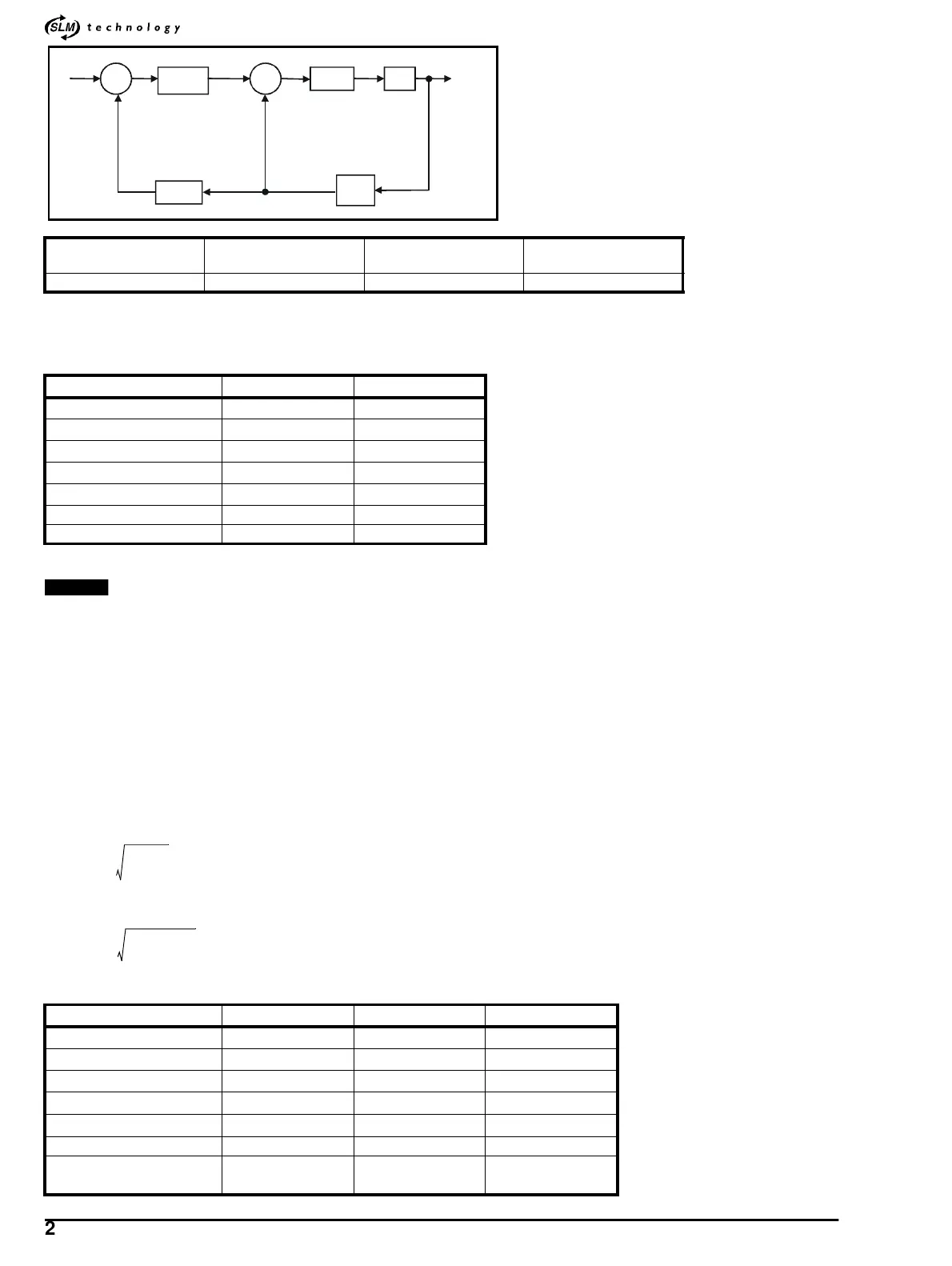
Speed measurement
delay
Torque reference
calculation delay
Torque controller delay
T
delay
62.5µs47.5µs600µs 710µs
Description M’Ax Parameter Symbol
Motor rated current 5.07
I
M(rated)
Symmetrical current limit (%) 4.07
I
limit
Motor torque constant 5.32
K
t
Motor Inertia 5.33
J
m
Load Inertia 3.20
J
L
Stiffness Angle 3.19 α
Total inertia 3.18 J
Description Symbol Value Units
Motor rated current
I
M(rated)
9.5 A
Symmetrical current limit (%)
I
limit
200 %
Motor torque constant
K
t
1.6
Nm/A
RMS
Motor Inertia
J
m
0.00076
Kgm
2
Load Inertia
J
L
0.00224
Kgm
2
Stiffness Angle α 6 °
Total inertia J
J
m
+J
L
Kgm
2
Kp+Ki/s
1+Kds
Kc.Kt
L(s)
_
+
_
w*(s+)
w(s)
T
delay
NOTE
K
c
I
limit
100
---- ---- ----
I
M rated()
×=
K
b
4
π
---
=
K
o
K
c
K
t
×=
K
i
22.5
α
-----------
90
π K
b
×α×
---------------------------
==
K
p
2
JK
i
×
K
b
K
o
×
--------------------=
K
d
1
2
---
J
K
b
K
o
× K
i
×
---------------------------------=