*
M’Ax Advanced User Guide 2
Issue Number: 4 www.controltechniques.com
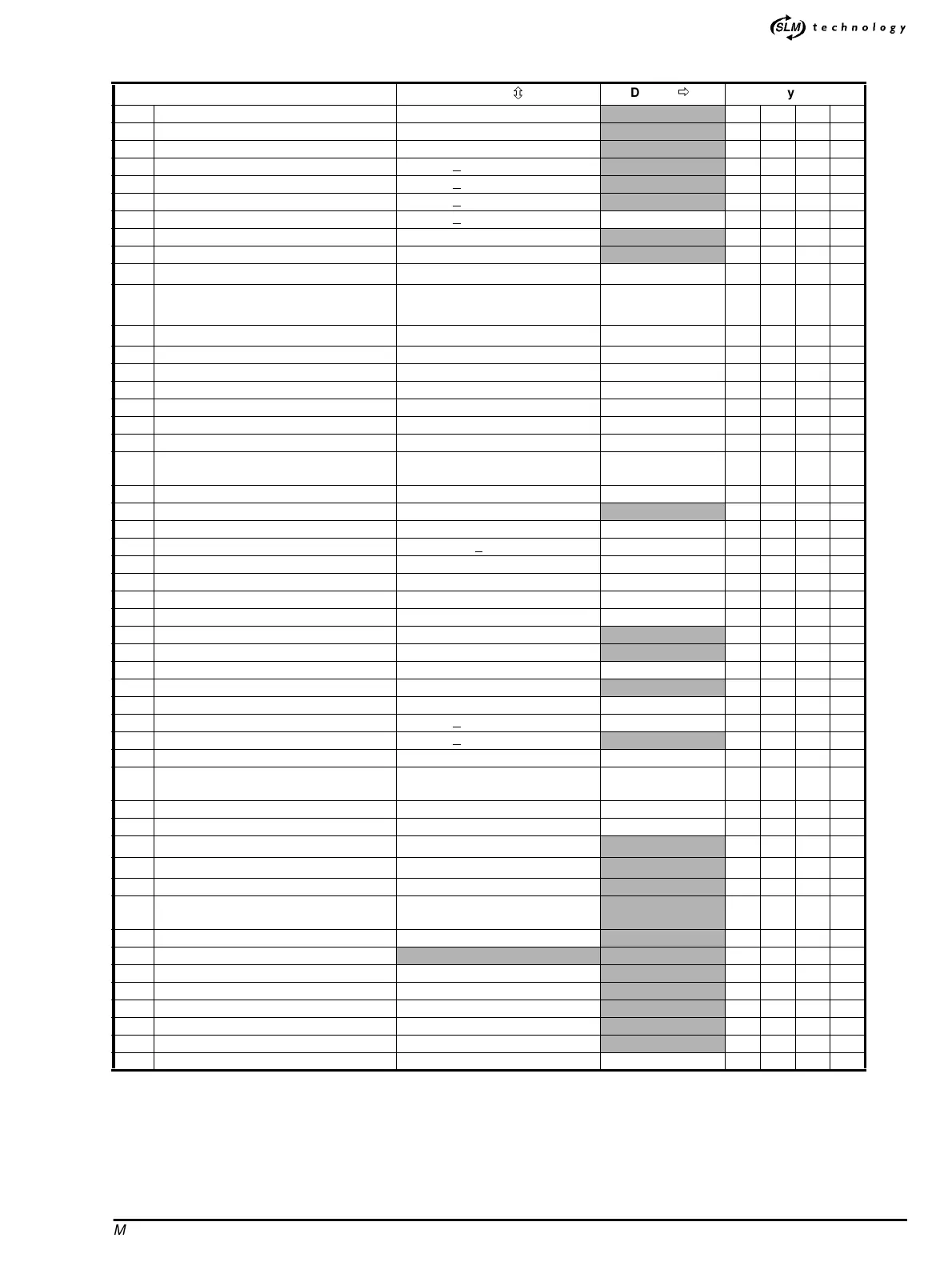
2 Menu 0 Parameters
[ ] = value of a parameter [SLM] = value defined by the motor via SLM
Parameter
Range(
ô
)Default(
ð
)
Type
0.00 Parameter XX.00 0 ~ 3001
RW Uni R S P
0.01 Hardware enable indicator 0~1
RO Bit P
0.02 Reference selected indicator 1~5
RO Uni P
0.03 Value of selected reference +
value of [1.06] RO Bi P
0.04 Final speed reference +
value of [1.06] RO Bi P
0.05 Speed feedback +
value of [1.06] RO Bi P
0.06 Reference offset +
value of [1.06]0RWUni
0.07 Motor current magnitude 0 ~ Max. overload current of drive
RO Uni P
0.08 Maximum reference clamp 0 ~ 7500
RW Uni
0.09 Stiffness angle
0.0 ~ 30.0
o
6.0 RW Uni
0.10 Load inertia
0.01~600.00kgcm
2
or
0.00001~0.06kgm
2
J
L
RW Uni
0.11 Inertia units selected
0~1(0=kgm
2
,1=kgcm
2
)
[SLM] RO Bit
0.12 Speed-loop PID gains selector 0~3 1 RW Uni
0.13 Speed-loop proportional gain Kp1 0.000 ~ 0.3000 [SLM] RW Uni
0.14 Speed-loop integral gain Ki1 0.000 ~ 20.000 [SLM] RW Uni
0.15 Speed-loop derivative gain Kd1 0.0000 ~ 0.1000 [SLM] RW Uni
0.16 Current-demand filter 1 cut-off frequency 0 ~ 1200 500Hz RW Uni
0.17 SLM on-line enable 0~1 0 RW Bit
0.18 Symmetrical current limit 0 ~ 300
200% continuous
motor current
RW Uni
0.19 Motor-rated current 0 ~ Full load current [SLM] RO Uni
0.20 Drive rated current (FLC) 00.00 ~ 99.99
RO Uni P
0.22 Torque mode selector 0 ~ 2 0 RW Bit P
0.23 Torque reference +
200.00 0~Drive current limit RW Bi
0.24 Ramp enable 0~1 0 RW Bit
0.25 Acceleration rate 0 ~ 32.000 0.200s/1000rpm RW Uni
0.26 Deceleration rate 0 ~ 32.000 0.200s/1000rpm RW Uni
0.27 Fast ramp select 0~1 0 RW Bit
0.28 Feedback-encoder revolution counter 0 ~ 65535
RO Uni
0.29 Feedback-encoder position 0 ~ 65535
RO Uni
0.30 Reference selector 0~5 1 RW Uni
0.31 Jog selected indicator 0~1
RO Bit P
0.32 Jog reference 0 ~ 500 50rpm RW Uni
0.33 Preset reference +
value of [1.06]1rpmRWBi
0.34 Keypad reference +
value of [1.06] RO Bi
0.35 User security code 0 ~ 255 149 RW Uni S P
0.36 Serial comms. baud rate
300, 600, 1200, 2400, 4800, 9600,
19200
9600BAUD RW Txt S P
0.37 Serial comms. address 0.0 ~ 24.7 1.1 RW Uni P
0.38 Initial parameter displayed selector 00.00 ~ 21.51 0.05 RW Uni P
0.39
Motor [I
2
t] overload trip indicator
0~1
RO Bit P
0.40
Motor [I
2
t] accumulator
0.0 ~ 100.0
RO Uni
0.41 Drive overload accumulator 0.0 ~ 100.0
RO Uni P
0.42
Internal braking-resistor overload
accumulator
0.0 ~ 100.0
RO Uni P
0.43 DC-bus voltage 0 ~ 1000 RO Uni P
0.44 Last trip
RO Txt S P
0.45 SLM communications integrity 0.0 ~ 100.0
RO Uni
0.46 Programmable parameter 00.00 ~ 21.51
RW
0.47 SLM software version 00.00 ~ 99.99
RO Uni P
0.48 Drive software version 00.00 ~ 99.99
RO Uni P
0.49 Security status indicator 000 ~ 111
RO Uni
0.50 Parameter transfer selector 0~4 _AN =0,_SL =4 RW Txt