*
M’Ax Advanced User Guide 28
Issue Number: 4 www.controltechniques.com
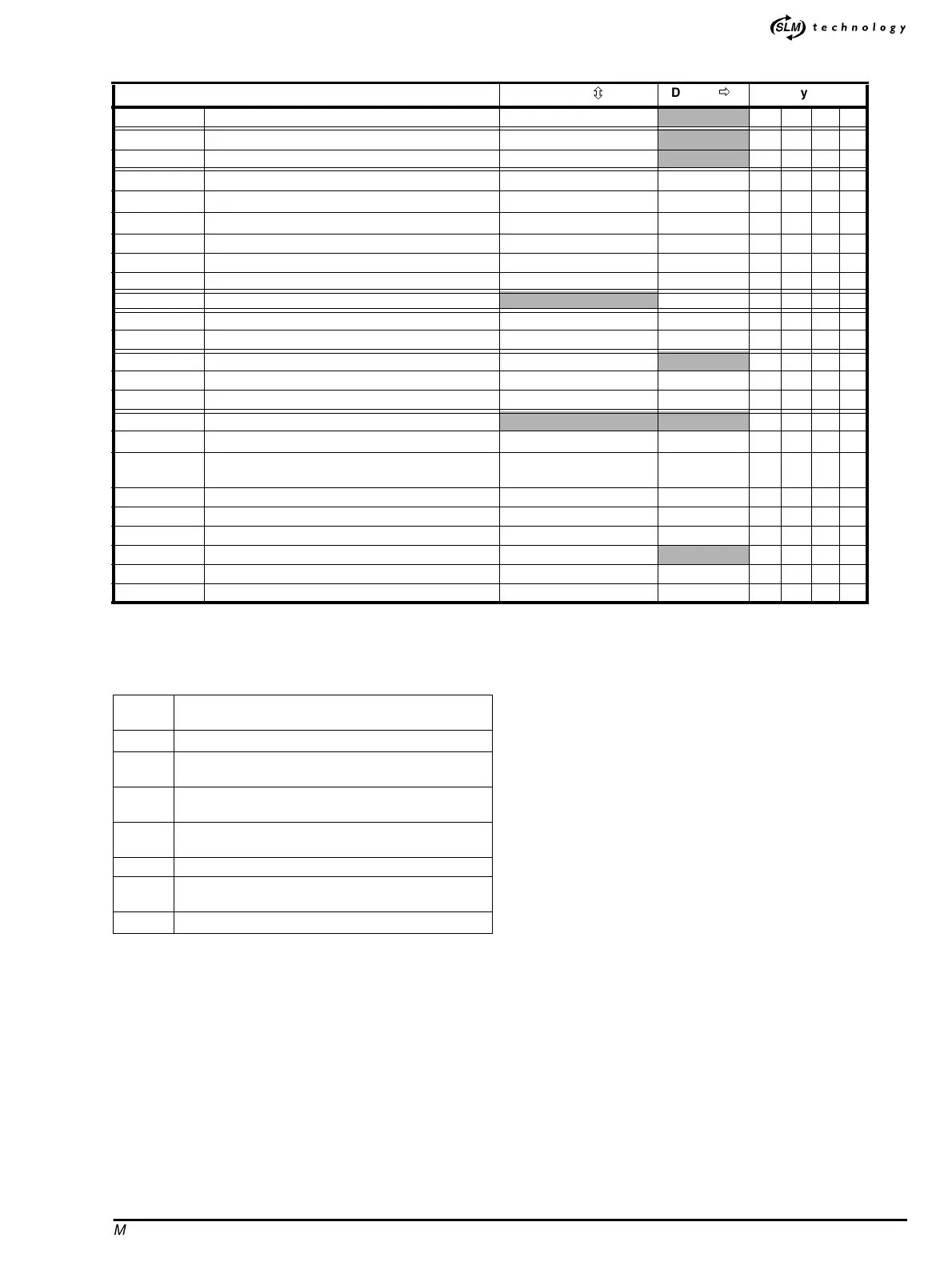
6 Menu 4 Parameters - Torque Control
Notes
Parameters 4.52, 4.53, 4.54: see section F.2 Adjusting the threshold for the motor thermal-overload alarm in the M’Ax User Guide.
Parameter 4.04: the range 0 ~ 620 represents 0 ~ 200% FLC
Parameter
Range(
ô
) Default(
ð
)
Type
4.01 {0.07} Motor current magnitude
0~I
OL
A
RO Uni P
4.03 Torque demand
±200.0%I
T
A
RO Bi P
4.04 Current demand 0 ~ 620
RO Uni P
4.07 {0.18} Symmetrical current limit Kc1
0 ~ 300.0% I
M
200.0 RW Uni
4.08 Torque reference
±200.0%I
LIM
0.0 RW Bi
4.09 Torque-reference offset
±200.0%I
LIM
0.0 RW Bi
4.10 Torque-reference offset enable 0~1 0 RW Bit
4.11 Torque mode selector 0~2 0 RW Uni
4.12 {0.16} Current-demand filter 1 cut-off frequency 0 ~ 1200Hz 500 RW Uni
4.15 Motor - thermal time-constant
[SLM] RO Uni
4.23 Current-demand filter 2 cut-off frequency 0 ~ 1200Hz 500 RW Uni
4.24 Symmetrical current limit Kc2
0 ~ 300.0% I
M
200.0 RW Uni
4.26 Torque-compensation gain 0 ~ 5000 rads/s
RW Uni
4.27 Current-demand filter 3 cut-off frequency 0 ~ 1200Hz 500 RW Uni
4.28 Symmetrical current limit Kc3
0 ~ 300.0% I
M
200.0 RW Uni
4.51 Reserved for internal system purposes
4.52 Motor thermal-overload trip level
0 ~ 125%I
M
110 RW Uni
4.53
Symmetrical current limit after motor thermal-
overload trip
0 ~ 300%I
M
105 RW Uni
4.54 Thermal-overload time to trip 0 ~ 200s 10 RW Uni
4.55 SLM overheat threshold parameter 0 ~ 100°C85RWUni
4.56 Motor overload alarm level 0 ~ 100 70 RW Uni
4.57 Motor overload alarm 0 ~ 1
RO Uni
4.58 ‘U’ phase current loop offset correction 0 ~ 65535 0 RW Uni
4.59 ‘V’ phase current loop offset correction 0 ~ 65535 0 RW Uni
FLC
Full-load current (continuous-current rating of the
drive)
I
OL
Maximum overload current from the drive [2 x FLC]
I
M
Rated continuous motor-current (defined by the motor
via the SLM)
I
T
Maximum torque-producing current (derived from
[FLC x kT])
I
LIM
Value of the current limit that is obtained from the
setting of 4.07 Symmetrical current limit
LT Trip level of the drive thermal-overload accumulator
n
MAX
Maximum speed of the motor (defined by the motor via
the SLM)
J
M
Motor inertia (defined by the motor via the SLM)