26 SM-Resolver User Guide
www.controltechniques.com Issue Number: 4
This parameter relates to the equivalent lines per revolution of a quadrature encoder
that would provide same resolution of feedback. This parameter should only be set to
256 (10 bit resolution), 1,024 (12 bit resolution) or 4,096 (14 bit resolution). If the
parameter is set to any other value the drive assumes the following: 32 to 256 = 256;
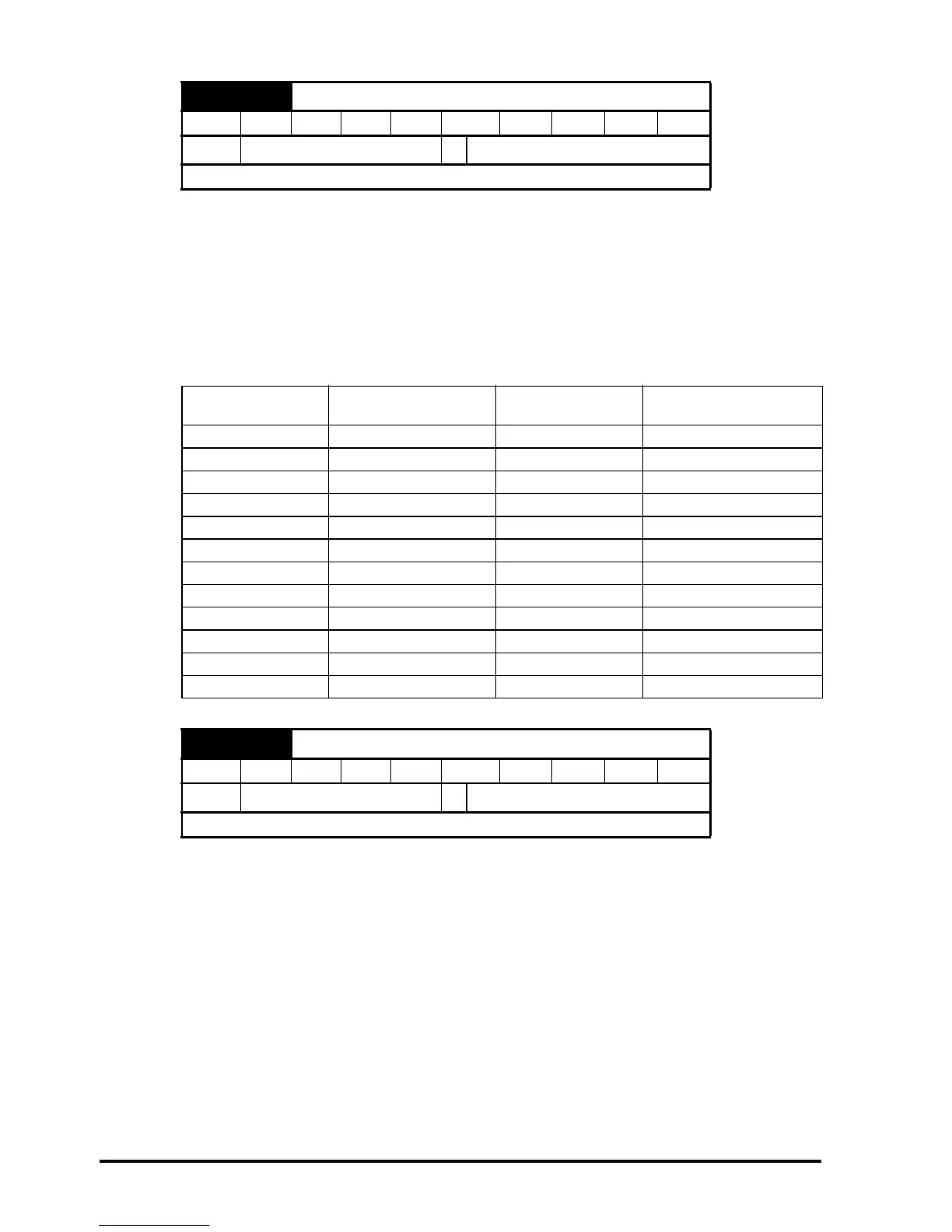
257 to 1,024 = 1,024; 1,025 to 50,000 = 4,096. If the drive is operating in Closed-loop
vector or Servo modes and the resolver is selected to provide speed feedback for the
drive (see Pr 3.23) then variable maximum SPEED_LIMIT_MAX is defined in the
following table.
The excitation level can be controlled for use with 3:1 ratio resolvers (Pr x.13 = 0), or 2:1
ratio resolvers (Pr x.13 = 1 or 2).
x.10 Equivalent lines per revolution
RW Uni US
Ú
0 to 50,000
Ö
4,096
Update rate: Background read
Resolver poles
(Pr x.15)
Equivalent lines per
revolution (Pr x.10)
Operating
resolution (bit)
SPEED_LIMIT_MAX
2 4,096 14 3,300.0
2 1,024 12 13,200.0
2 256 10 40,000.0
4 4,096 14 1,650.0
4 1,024 12 6,600.0
4 256 10 26,400.0
6 4,096 14 1,100.0
6 1,024 12 4,400.0
6 256 10 17,600.0
8 4,096 14 825.0
8 1,024 12 3,300.0
8 256 10 13,200.0
x.13 Resolver excitation
RW Uni US
Ú
3:1 (0), 2:1 (1 or 2)
Ö
3:1 (0)
Update rate: Background read