Chapter 6 Control Modes of Operation|ASDA-A&A+ Series
Revision April 2009 6-13
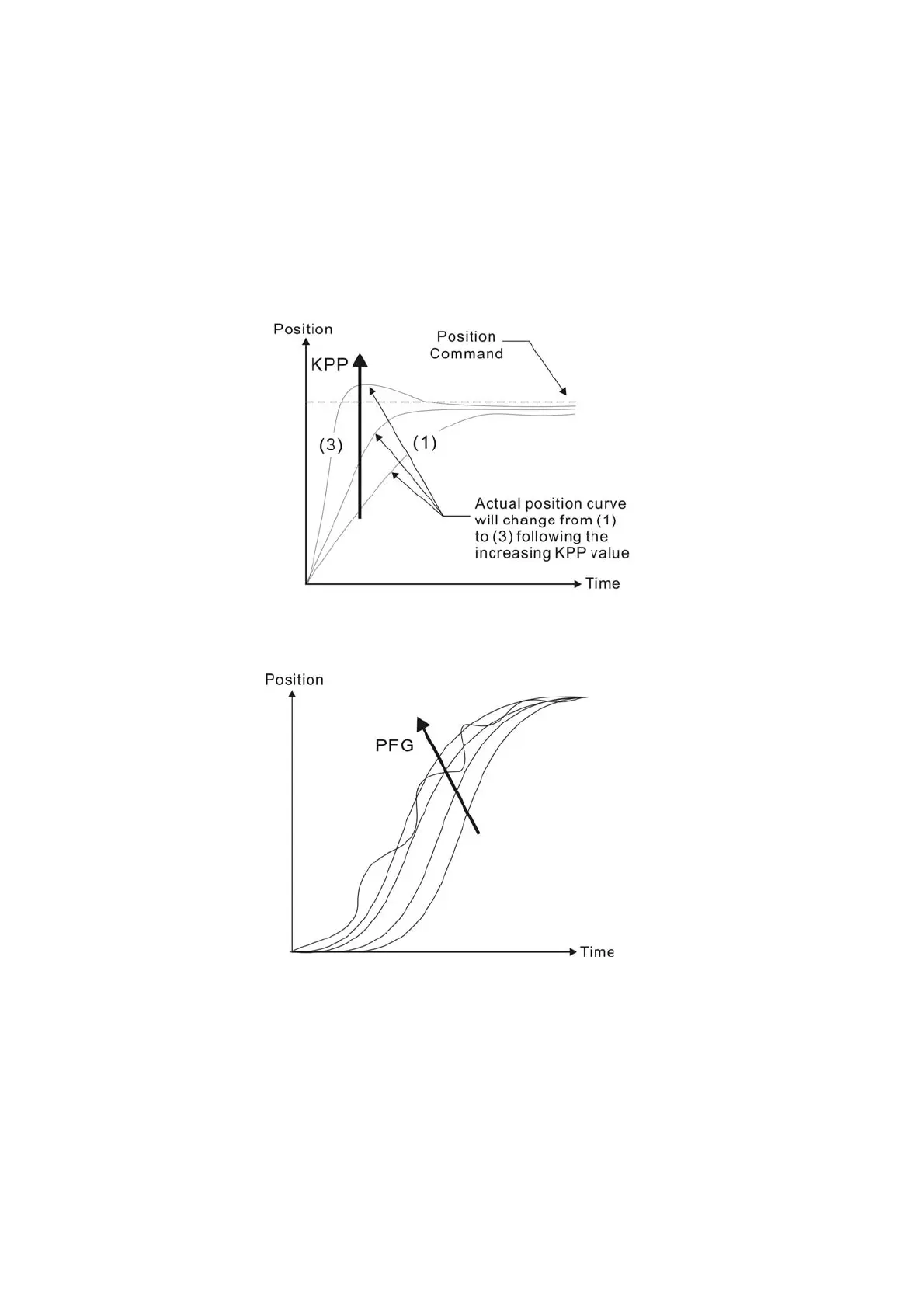
When the value of Proportional Position Loop Gain, KPP is too great, the position loop responsiveness
will be increased and it will result in small phase margin. If this happens, the rotor of motor will oscillate.
At this time, the users have to decrease the value of KPP until the rotor of motor stop oscillating. When
there is an external torque command interrupted, over low KPP value will let the motor cannot overcome
the external strength and fail to meet the requirement of reasonable position track error demand. Adjust
feed forward gain, PFG (P2-02) to efficiently reduce the dynamic position track error.
Call 1(800)985-6929 for Sales
Call 1(800)985-6929 for Sales