Chapter 6 Control Modes of Operation|ASDA-A&A+ Series
Revision April 2009 6-29
P2-07
P2-25
PI Controller
(Proportional and
Integral Controller)
P2-04,2-06
PWM
P2-23,P2-24
differentiator
Encoder
Feed forward
Gain
Speed estimator
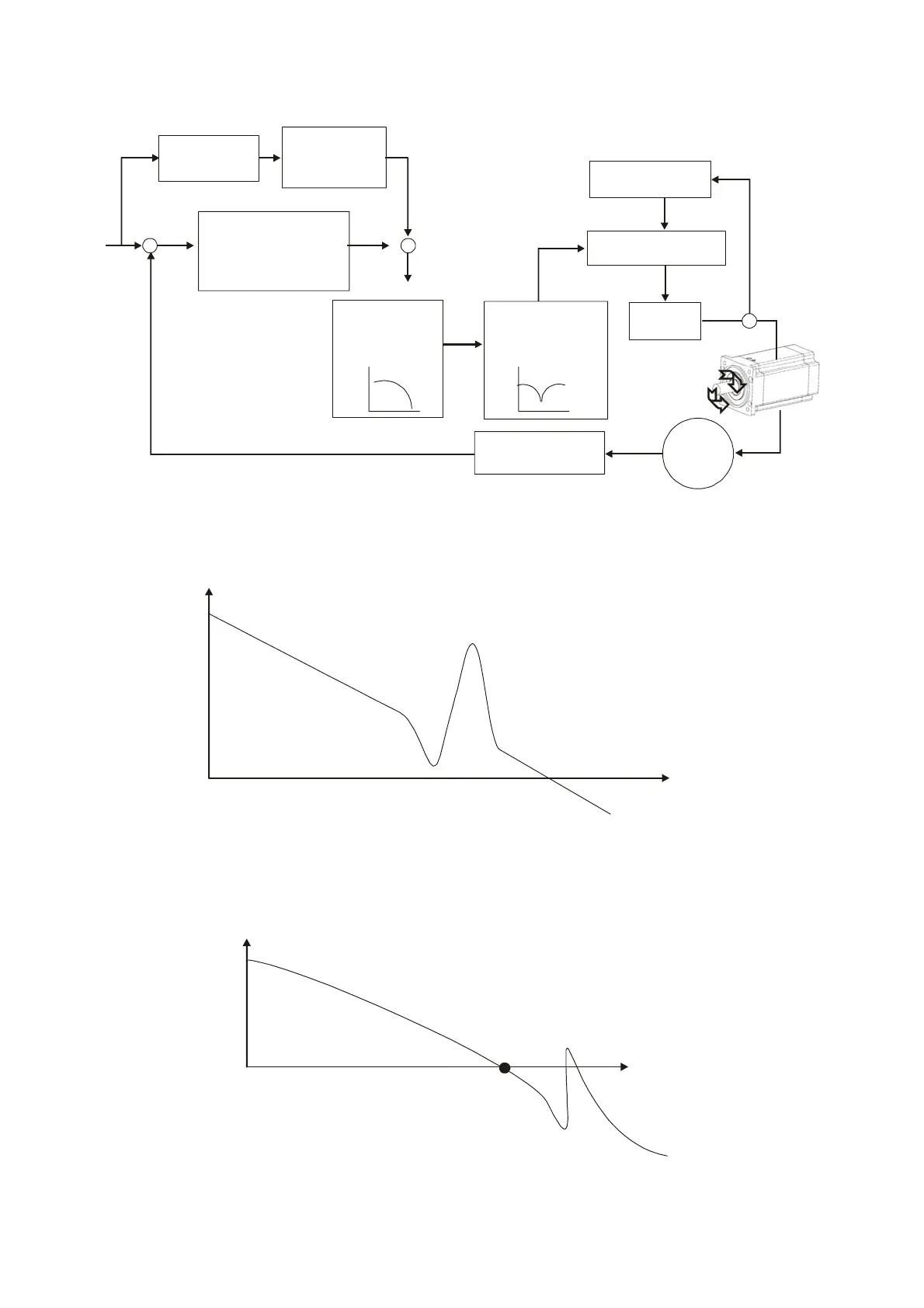
Speed Control Block Diagram
Low-pass
Filter
Notch Filter
To rqu e
Load
Current Sensor
Current Controller
Low-pass filter
Please use parameter P2-25. The figure below shows the resonant open-loop gain.
Gain
Frequency
When the low-pass filter (parameter P2-25) is adjusted from 0 to high value, the value of Low-pass
frequency (BW) will become smaller (see the figure below). The resonant condition is improved and the
frequency response and phase margin will also decrease.
0dB
BW
Gain
Frequency
Call 1(800)985-6929 for Sales
Call 1(800)985-6929 for Sales