Chapter 7 Servo Parameters|ASDA-A&A+ Series
7-44
Revision April 2009
For example:
If A=2 and B=0, i.e. P1-46 is set to 2, and P1-61 is set to 7 (Default), the pulse numbers of
encoder outputs per motor revolution =
2501
2
2
2
2500
7
7
=×
It indicates that the encoder will output 1250 pulses per motor revolution.
• When B=1, the range of the setting value A is 20 ~ 2500, the pulse numbers of encoder
outputs per motor revolution =.
2500)A(1
2
2
A
61P1
7
≤≤×
−
If A=500 and B=1, i.e. P1-46 is set to 10500, and P1-61 is set to 7 (Default), the pulse
numbers of encoder outputs per motor revolution =
500
2
2
)005(
7
7
=×
It indicates that the encoder will output 500 pulses per motor revolution.
NOTE
1) The default setting of parameter P1-61 is 7.
2) The max. frequency for pulse output is 500Kpps.
P1 - 47
HMOV Homing Mode Communication Addr.: 012FH
Default: 00 Related Section:
Applicable Control Mode: ALL Section 12.8
Unit: N/A
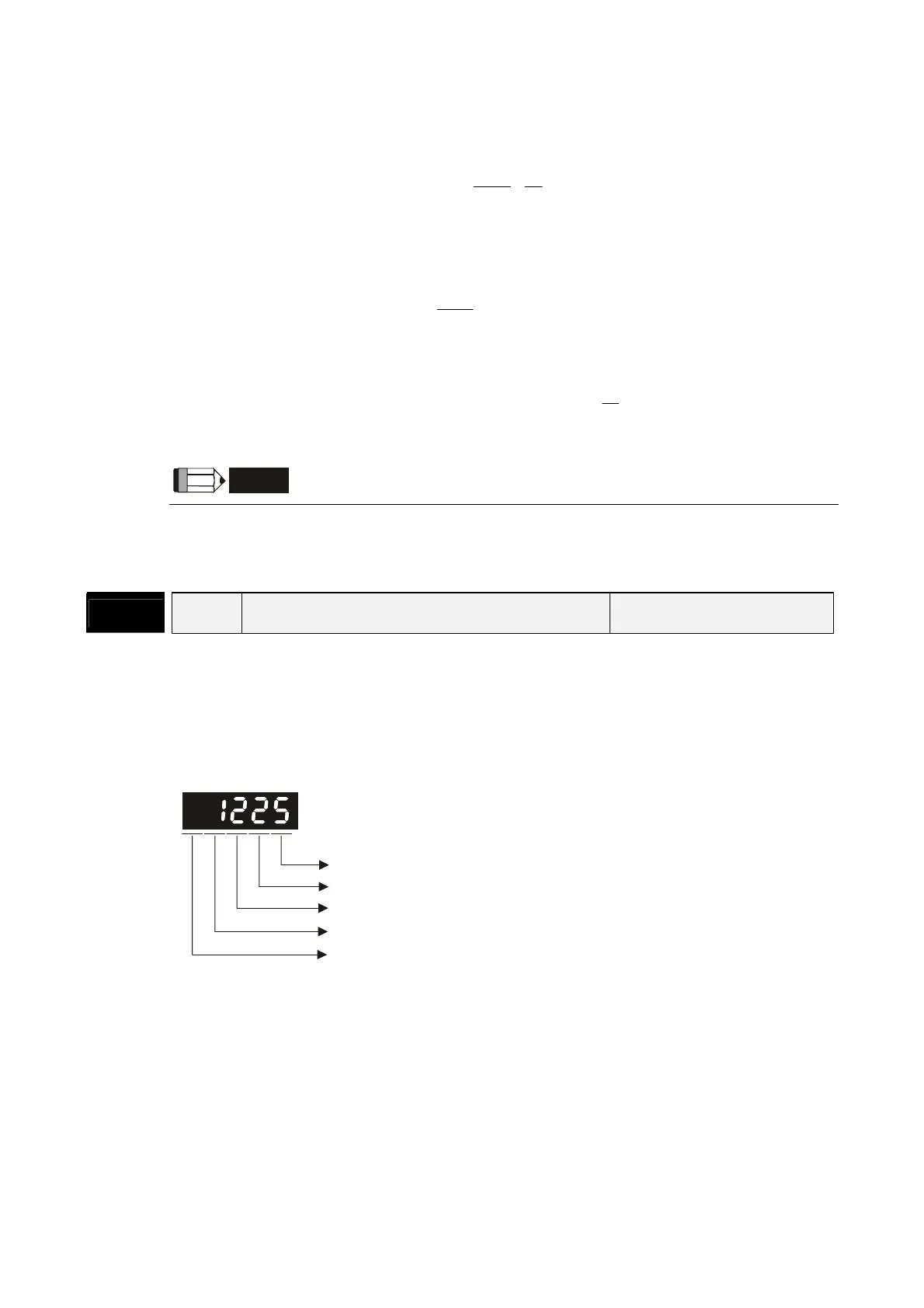
Range: 00 ~ 1225
Settings:
not used
B
C
D
• A=0: Forward homing (CCWL as “Home”)
• A=1: Reverse homing (CWL as “Home”)
• A=2: Forward homing (ORGP as “Home”)
• A=3: Reverse homing (ORGP as “Home”)
• A=4: Forward to find Z-phase pulse and regard Z-
phase pulse as “Home”
• A=5: Reverse to find Z-phase pulse and regard Z-
phase pulse as “Home”
• B=0: Return to find Z-phase pulse during homing
• B=1: Do not return and go forward to find Z-phase pulse during homing
• B=2: Positioning at home sensor position or Z-phase pulse during homing (it only can be
used when A=2, 3, 4 or 5)
• C=0: Disable homing function.
• C=1: Enable homing function automatically after power supplies to the servo drive.
Call 1(800)985-6929 for Sales
Call 1(800)985-6929 for Sales