Chapter 7 Parameters ASDA-B2
7-38 Revision May, 2018
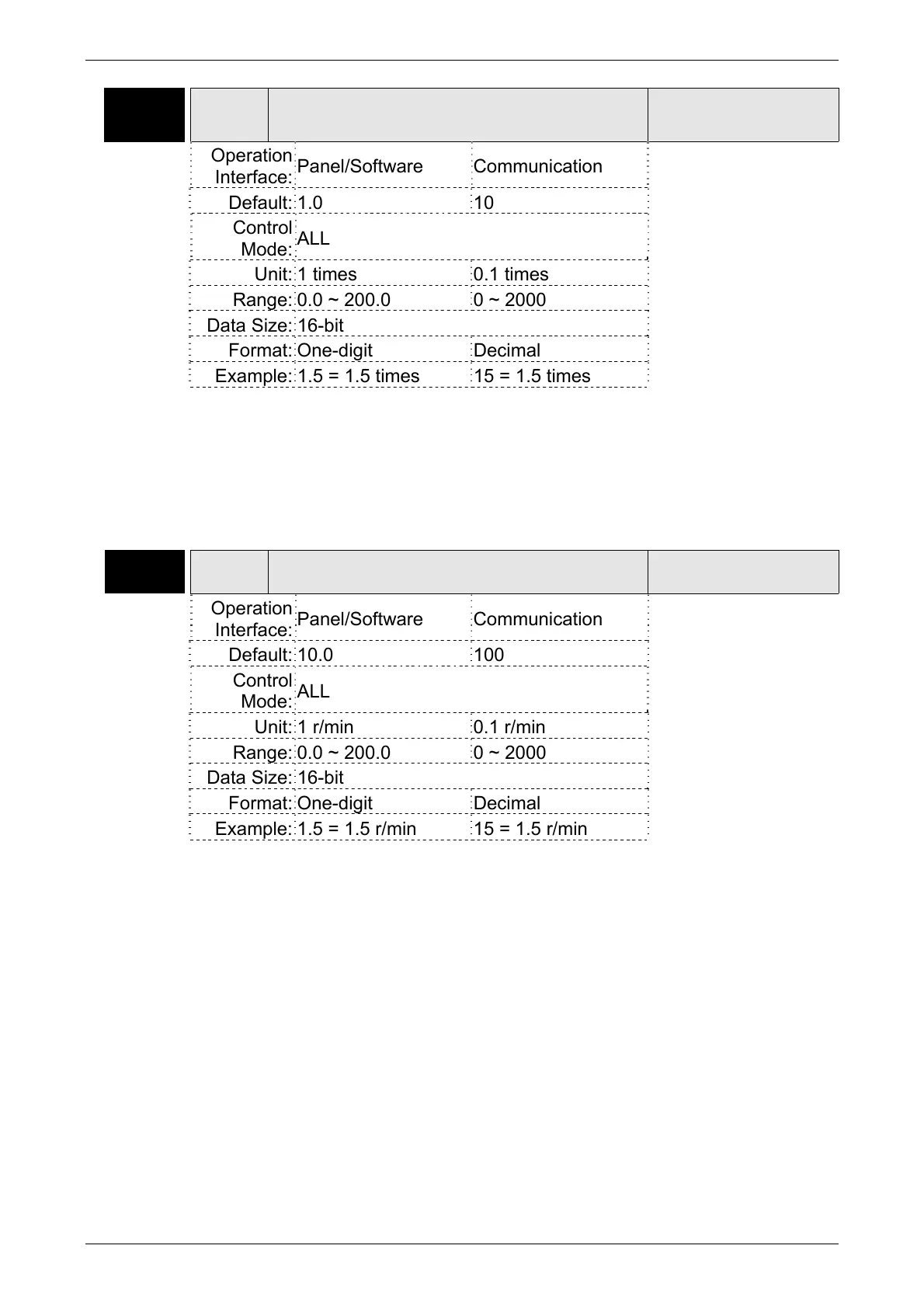
P1-37 GDR
Inertia Ratio and Load Weight Ratio to
Servo Motor
Address: 014AH
014BH
Operation
Interface:
Panel/Software Communication
Related Section: N/A
Default: 1.0 10
Control
Mode:
ALL
Unit: 1 times 0.1 times
Range: 0.0 ~ 200.0 0 ~ 2000
Data Size: 16-bit
Format: One-digit Decimal
Example: 1.5 = 1.5 times 15 = 1.5 times
Settings: Inertia ratio to servo motor (rotary motor)
(J_load / J_motor)
Among them:
J_motor: Rotor inertia of the servo motor
J_load: Total equivalent of inertia of external mechanical load.
P1-38 ZSPD
Zero Speed Range Setting
Address: 014CH
014DH
Operation
Interface:
Panel/Software Communication
Related Section:
Table 7.2
Default: 10.0 100
Control
Mode:
ALL
Unit: 1 r/min 0.1 r/min
Range: 0.0 ~ 200.0 0 ~ 2000
Data Size: 16-bit
Format: One-digit Decimal
Example: 1.5 = 1.5 r/min 15 = 1.5 r/min
Settings: Setting the output range of zero-speed signal (ZSPD). When the
forward / reverse speed of the motor is slower than the setting
value, the digital output will be enabled.

 Loading...
Loading...

